Extras din proiect
TEMA DE PROIECT
Să se proiecteze un robot industrial cu arhitectură generală de tip SCARA, cu următoarele caracteristici tehnice generale:
-Număru total de axe comandate numeric: 5;
-Sistemul de acţionare: electrică - pentru toate gradele de libertate ale robotului industrial; pneumatică sau hidraulică - pentru efectorul robotului industrial.
-Denumirea axelor comandate numeric, cursele şi vitezele pe fiecare axă comandată numeric, a robotului industrial:
Axa1 (rotaţia la baza robotului industrial):
θ1= 360 [grade]= 6,283 [rad];
ω1= 160 [grade/sec]= 2,792 [rad/sec];
Axa2 (translaţia pe verticală a braţului articulat):
x2= 1500 [mm];
v2 = 1600 [mm/sec];
Axa3 (rotaţia segmentului 2 al braţului articulat)
θ3= 280 [grade]= 4,886 [rad];
ω3= 150 [grade/sec]= 2,618 [rad/sec];
Axa4 (mişcarea de orientare a efectorului de tip Pitch):
θ4= 240 [grade]= 4,188 [rad];
ω4=110[grade/sec]= 1,919 [rad/sec];
Axa5 (mişcarea de orientare a efectorului de tip Roll):
θ5= 360 [grade]= 6,283 [rad];
ω5= 160 [grade/sec]= 2,792 [grade/sec];
-Sarcina portantă (masa maximă a obiectului manipulat) este m= 6 [kg];
-Dimensiunile maxime ale obiectelor manipulate :
LxBxH: 320x160x230 [mmxmmxmm];
-Timp de accelerare sau frânare a elementelor mobile pe axele comandate numeric: t= 0,5[sec];
Cap.1 Elemente introductivee
1.1. Roboti de tip SCARA-definitii si principii constructive de baza.
Robotii SCARA sunt roboti care au doua articulatii de axe paralele care ofera posibilitatea de operare intr-un anumit plan selectat. Sunt roboti cu spatiul de lucru cilindric.
Initialele SCARA provin de la: ‚,Sellective Compliant Articulated Robot Arm’’.
Solutia constructiva propusa se constituie dintr-un mecanism de pozitionare cu trei grade de libertate, ce are in componenta trei elemente cinematice si trei cuple cinematice de clasa a V-a si un mecanism de pozitionare cu doua grade de libertate.Cele trei grade de libertate ale mecanismului de pozitionare corespund miscarilor de:
Rotatie la baza(Rz), translatie pe verticala (Tz) si rotatie a bratului articulat in plan orizontal (Rz). Schema cinematica a acestui robot se prezinta in figura 1.1.1. Motoarele corespunzatoare celor trei grade de libertate sunt plasate astfel: motorul electric rotativ corespunzator rotatiei la baza, solidar cu batiul robotului industrial (miscarea fiind transmisa prin intermediul unei curele dintate); motorul electric liniar,solidar cu elementul 2; motorul electric rotativ al elementului 3, situat deasupra bratelor 2 si 3.Mecanismul de orientare al robotului introduce alte doua grade de libertate care corespund miscarilor: rotatie de tip pitch si totatie de tip roll.
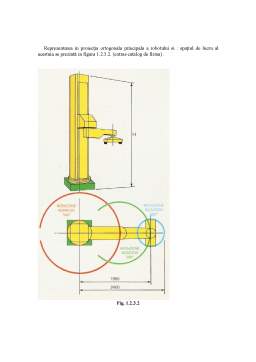
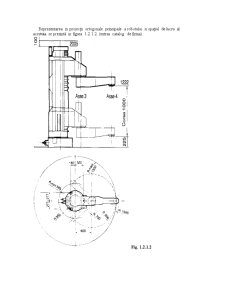
In figura de mai jos este przentata schema constructiva a robotului Staubli RS 154/156. (extra catalog de firma).
Preview document























Conținut arhivă zip
- Robot de Tip Brat Articulate Mobil in Plan.doc
Alții au mai descărcat și

Rezumat Ȋn lucrarea de faţă este prezentat un robot industrial cu mişcări de rotaţie şi translaţie comandat de un controler logic programabil....

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

. Definitia robotului si a robotului industrial Robotul este un sistem cu functionarea automata, adaptabila prin programare conditiilor mediului...

1. NOTIUNI GENERALE PRIVIND ROBOTII INDUSTRIALI 1.1. Definitii si notiuni uzuale utilizate Cuvântul `robot` a fost folosit pentru prima datã în...
