Cuprins
- Introducere pag 3
- 1.2 Roboti pag 5
- 2.Stabilirea functiilor sistemului mecatronica pag 7
- 2.1 Functia de perceptie pag 8
- 2.2 Functia de procesare pag 10
- 2.3 Functia de prelucrare date si informatii pag 10
- 2.4 Functia mecanica a robotului pag 10
- 3.Stabilirea subsistemelor cu identificarea subfunctiilor lor specifice. pag 12
- 3.1 Subsistemul mecanic pag 14
- 3.2 Subsistemul electro electronic pag 15
- 3.3 Subsistemul software pag 16
- 3.4 Subsistemul senzorial pag 17
- 3.5 Subsistemul de calcul pag 18
- 4.Descrierea aspectelor de miscare pag 19
- 5.Determinarea capabilitatilor de perceptie. pag 23
- 6.Identificarea problemelor privind procesarea pag 26.
- 7.Identificarea problemelor privind prelucrarea datelor si informatiilor...pag 28
- 8.Concluzii pag 31
- 9.Bibliografie pag 31
Extras din proiect
Introducere
Mecatronica este rezultatul evolutiei firesti in dezvoltarea tehnologica.
Fig.1
Aceasta imagine sugereaza faptul ca, in activitatea de conceptie, pentru realizarea de produse si servicii performante, abordarea traditionala in baza careia: ingineria mecanica studiaza probleme specifice miscarii maselor, ingineria electrica-electronica studiaza probleme specifice miscarii electronilor, iar automatistii-informaticienii studiaza probleme specifice miscarii informatiei, nu mai este posibila. In structura unui produs mecatronic, practic nu se pot separa cele trei miscari. Mai mult, imaginea sugereaza ca activitatile de conceptie si proiectare vizeaza finalizarea prin procesare-fabricare. Totul se desfasoara pe baza unui management performant, in acord cu nevoile pietei.
Definire: Sistemul mecatronic urmareste realizarea unor sisteme cu functii complexe, eterogene si definite ca acele sisteme care preiau semnale din mediu, le proceseaza si le prelucreaza rational sau inteligent, si actioneaza in si/sau asupra caruia prin forte, deplasari, schimb de substante.
Evolutia este sugestiv evidentiata in figura urmatoare:
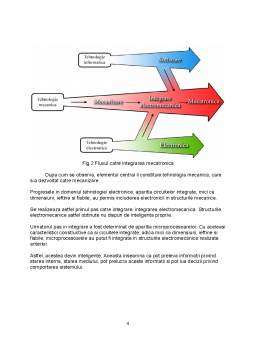
Fig.2 Fluxul catre integrarea mecatronica
Dupa cum se observa, elementul central il constituie tehnologia mecanica, care s-a dezvoltat catre mecanizare.
Progresele in domeniul tehnologiei electronice, aparitia circuitelor integrate, mici ca dimensiuni, ieftine si fiabile, au permis includerea electronicii in structurile mecanice.
Se realizeaza astfel primul pas catre integrare: integrarea electromecanica. Structurile electromecanice astfel obtinute nu dispun de inteligenta proprie.
Urmatorul pas in integrare a fost determinat de aparitia microprocesoarelor. Cu aceleasi caracteristici constructive ca si crcuitele integrate, adica mici ca dimensiuni, ieftine si fiabile, microprocesoarele au putut fi integrate in structurile electromecanice realizate anterior.
Astfel, acestea devin inteligente. Aceasta inseamna ca pot preleva informatii privind starea interna, starea mediului, pot prelucra aceste informatii si pot lua decizii privind comportarea sistemului.
Fig.3 Structura unui sistem mecatronic
Fig.4 Etapele proiectarii unui sistem mecatronic.
1.2 Roboti
Definitie: Robotul este un manipulator reprogramabil, multifuncţional, destinat sa deplaseze materiale, piese, scule sau aparate, prin mişcări programate variabil, în scopul îndeplinirii unor sarcini diferite.
- structura funcţională a robotului evidenţiază compunerea lui din subsisteme care au o anumite subfuncţiune în sistemul funcţiilor robotului.
- structura constructivă a robotului evidenţiază compunerea din subansambluri constructive (module).
Roboţii mobili reprezintă, probabil, cea mai spectaculoasă şi reprezentativă categorie de sisteme mecatronice, mai ales datorită încercării de a copia şi de a se apropia de modele din lumea vie. În multe universităţi în care se studiază mecatronica, testul de maturitate al unui student este dat de proiectarea şi construcţia unui robot mobil, de un anumit tip, cu o structură mecanică mai mult sau mai puţin complexă, cu motoare de acţionare care asigură deplasarea în mediul înconjurător, cu senzori care îi permit orientarea, identificarea şi evitarea obstacolelor şi cu un „creier”, constituit dintr-unul sau mai multe procesoare numerice, care asigură comanda întregului sistem.
Preview document































Conținut arhivă zip
- cuprins.doc
- Robot pentru Salvarea Oamenilor din Incendii.doc
Alții au mai descărcat și

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
