
Cuprins
- Introducere
- Capitolul I Sisteme automatizate. Definiţie. Clasificare
- Capitolul II Roboţi în coordonate carteziene
- 2.1 Definiţie
- 2.2 Clasificare
- 2.3 Cinematica
- Capitolul III Maşini de comandã numericã
- 3.1 Maşini de comandã numericã în domeniul textilelor
- 3.2 Funcţii
- 3.3 Anatomia
- 3.4 Funcţionare
- Capitolul IV Concluzii
- Bibliografie
Extras din proiect
Încã din cele mai vechi timpuri omul a încercat sã gãseacã o modalitate de aş uşura munca pe care o interprinde, dar nu numai. O data cu începerea producţiei de masã în special în domeniul auto, datoritã “descoperiri” lui Ford şi anume realizarea autovehiculelor la mai multe posturi de lucru necesitatea unor astfel de “maşinãrii” care sã preia anumite responsabilitãţi ale oamenilor era o prioritate evidenta, deoarece unele posturi de lucru prezentau anumite pericole pentru muncitori sau necesitau o precizie foarte mare.
Conform ultimelor descoperiri ale istoricilor se pare cã primul robot s-ar fi inventat în Grecia Anticã şi ar fi avut forma unui porumbel care putea zbura pe distanţe mici propulsat cu ajutorul vaporilor. Însã primul robot cu adevarat util a fost brevetat de catre George Devol în anul 1956, urmând ca mai apoi prima companie care sã folosit un astfel de robot industrial sã fie firma General Motors în anul 1961.
[ Un robot este un operator mecanic sau virtual, artificial. Robotul este un sistem compus din mai multe elemente: mecanicã, senzori şi actuatori precum şi un mecanism de direcţionare. Mecanica stabileşte înfãţişarea robotului şi mişcãrile posibile pe timpul funcţionãrii. Senzorii şi actuatorii sunt întrebuinţate la interacţiunea cu mediul sistemului. Mecanismul de direcţionare are grijã ca robotul sã-şi îndeplineascã obiectivul cu succes, evaluând de exemplu informaţiile primite de la senzori. Acest mecanism regleazã motoarele şi planificã mişcãrile care trebuie efectuate.] (1)
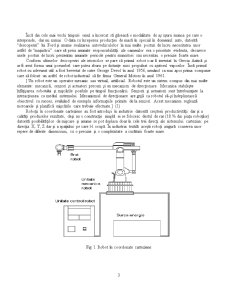
Roboţii în coordonate carteziene au fost introduşi în industrie datoritã creşterii productivitãţi dar şi a calitãţi produselor rezultate, deşi au o construcţie simplã ei se folosesc destul de rar (18 % din piaţa roboţilor) datoritã posibilitãţilor de mişcare şi anume se pot deplasa doar în cele trei direcţi ale sistemului cartezian: pe direcţia X, Y, Z dar şi a spaţiului pe care î-l ocupã. În industria textilã aceşti roboţi asigurã coaserea unor repere de diferite dimensiuni, cu o precizie şi o complexitate a cusãturii foarte mare.
Fig 1. Robot în coordonate carteziene
Capitolul I. Sisteme automatizate. Definiţie. Clasificare
Ca rãspuns a noilor tehnologii care au apãrut în ultimi 20 de ani ( roboţi, programe de proiectare,etc), sistemele de fabricaţie au evoluat şi ele o datã cu noile descoperiri astfel ca ele sã fie deosebit de productive dar în acelaşi timp producând puţine rebuturi deci cu un impact foarte mare asupra calitãţii produsului finit. Astazi omul lucrãnd împreunã cu roboţi pe aceeaşi linie de producţie.
Ca sã inţelegem mai bine un sistem automatizat v-a trebui sã vorbim despre un sistem de fabricaţie care reprezintã un ansamblu de mijloace de producţie care sa funcţioneze împreunã pentru aş-i atinge scopul şi anume obtinerea unui produs, în condiţiile în care avem intrãri pe deoparte şi anume materie primã iar pe de cealaltã parte produsul finit care a trecut prin toate operaţiile tehnologice. În timp ce un sistem de productie reprezintã orice sistem care dã unui produs brut o valoare mai mare, dacã acesta este automat el trebuie sã mai conţinã: un bloc operativ ( acţioneazã asupra produsului brut pânã la obţinerea unui produs finit şi este compus din toate subansamblele şi dispozitivele fizice ce interacţioneazã prentru a obţine valoare adãugatã) şi un bloc de comandã şi control care emite ordine pentru blocul operativ.
Sistemele de automatizare a maşinilor şi utilajelor se clasificã:
- sisteme rigide: maşini unelte automate şi semiautomate, programarea se face cu ajutorul camelor care acţioneazã un sistem de pârghii.
- sisteme secvenţiale – caracterizate prin existenţa în general a unor limitatori de cursã pentru fiecare directie de deplasare sau rotaţie;
- sisteme şi echipamente de comandã numericã caracterizate prin existenta de traductoare, senzori, reglarea automatã a mişcarilor, etc
- sisteme de copiere care pot fi mecanice, electrice, hidraulice
- sisteme adaptive: prezintã o mare complexitate, adaptare automatã a maşinii la parametrii procesului.
Preview document















Conținut arhivă zip
- Robotii in Coordonate Carteziene si Echipamente de Comanda Numerica.doc