Extras din proiect
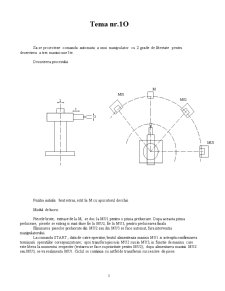
Sa se proiecteze comanda automata a unui manipulator cu 2 grade de libertate pentru deservirea a trei masini-une1te.
Descrierea procesului
Pozitia initiala: brat retras, rotit la M cu apucatorul deschis.
Modul de lucru:
Piesele brute, extrase de la M, se duc Ia MU1 pentru o prima prelucrare. Dupa aceasta prima prelucrare, piesele se extrag si sunt duse fie la MU2, fie la MU3, pentru prelucrarea finala.
Eliminarea pieselor prelucrate din MU2 sau din MU3 se face automat, fara interventia manipulatorului.
La comanda START , data de catre operator, bratul alimenteaza masina MU1 si asteapta confirmarea terminarii operatiilor corespunzatoare; apoi transfera piesa in MU2 sau in MU3, in functie de masina care este libera la momentui respectiv (testarea se face cu prioritate pentru MU2); dupa alimentarea masinii MU2 sau MU3, se va realimenta MU1. Ciclul se continua cu astfel de transferuri successive de piese.
O operatie de alimentare masinii MU1 se desfasoara astfel: bratul avanseaza (la M), prinde piesa, se retrage, Se roteste la MU1, avanseaza, elibereaza piesa, se retrage si comanda initierea ciclului de lucru al masinii.
Dupa confirmarea sfirsitului prelucrarii in MU1, bratul avanseaza, prinde piesa prelucrata primar, se retrage, se roteste la MU2 (sau la MU3) si, daca se confirma ca piesa aflata anterior in masina respectiva a fost eliminata, avanseazã, elibereaza piesa, se retrage si comanda ciclul de lucru la masina alimentata.
Observatii:
1. Se va prevedea in schema de comanda un selector al regimului de lucru, care sä permita functionarea procesului In 3 regimuri:
- AUTOMAT CONTINUU - dupa comanda START, automatul functioneaza fara interventia operatorului, atat timp cat dispune de toate conditiile impuse;
- AUTOMAT CICLU CU CICLU - la comanda START, procesul efectueaza un ciclu de lucru complet dupa care asteapta in pozitia initiala o noua comanda de pornire;
- MANUAL REGLAJ - fiecare deplasare a elementelor mobile se comanda prin actionarea unor butoane specifice situate pe panoul operatorului.
2. Se vor prevedea 2 butoane de oprire a procesului comandat:
- STOP, dupa actionarea caruia ciclul in curs de executie este terminat, procesul ramanand in pozitia initiala si asteptand o noua comanda de lucru; dupa oprirea procesului in urma unei comenzi STOP, tensiunea de alimentare poate fi deconectata;
- AVARIE, la apasarea caruia elementele mobile ale procesului se opresc; reluarea functionarii ansamblului se poate face numai printr-o comandã START, activa in conditiile initiale stabilite; pentru aceasta, procesul se aduce prin regimul MANUAL in pozitia initiala.
3. Zona de actiune a ansamblului de masini este protejata printr-o bariera cu ultrasunete cu iesire discreta. Protectia trebuie declansata odata cu initierea unui ciclu de lucru. Patrunderea unui corp strain in interiorul zonei de lucru in timpul functionarii procesului trebuie sa determine blocarea acestuia, simultan cu transmiterea unui semnal de avertizare corespunzator.
4. Deplasarile se efectueaza la capat de cursa; pozitiile organelor mobile sunt sesizate de senzori cu iesire discreta.
5. Inilierea lucrului , sau repunerea in ciclul automat de functionare dupa o oprire de avarie poate fi realizata numai ce catre operator, si numai din pozitia initiala stabilita a procesului, printr-o comanda START.
1.2 Definirea variabilelor de intrare
a) Variabile primare de intrare
Simbol Descriere
P Buton de comanda a ciclului automat de functionare
STOP Buton de oprire de avarie
SRL Comutator selectare a regimului de lucru (1-automat 0-continuu)
SRA Comutator selectare regim automat (1-continuu 0-ciclu cu ciclu)
BU Bariera cu ultrasunete
PP Confirmare prezenta piesa pe post de preluare din magazie
MU1L Confirmare masina-unealta MU1 libera
MU2L Confirmare masina-unealta MU2 libera
MU3L Confirmare masina-unealta MU3 libera
LA Confirmare limita avans
LR Confirmare limita retragere
LS Confirmare limita stanga la rotire (in fata MU1)
LD2 Confirmare limita dreapta la rotire (in fata MU2)
LD3 Confirmare limita dreapta la rotire (in fata MU3)
LC Confirmare limita centrala la rotire
LP Confirmare piesa stransa de apucator
LE Confirmare piesa eliberata (apucator deschis)
Preview document













































Conținut arhivă zip
- Sa se Proiecteze Comanda Automata a Unui Manipulator cu 2 Grade de Libertate pentru Deservirea a Trei Masini-Unelte.doc
Alții au mai descărcat și

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...