Cuprins
- CAPITOLUL 1
- PROBLEMATICA SISTEMELOR DINAMICE
- 1.1 Aspecte generale privind noţiunea de sistem 1
- 1.2 Reprezentări ale sistemelor dinamice 3
- 1.3 Criterii de stabilitate a sistemelor dinamice 8
- CAPITOLUL 2
- SINTEZA SISTEMELOR DE REGLARE LINIARE PRIN METODA LOCULUI RĂDĂCINILOR
- 2.1. Aspecte teoretice 13
- CAPITOLUL 3
- SINTEZA SISTEMELOR DE REGLARE PE BAZA RĂSPUNSULUI ÎN FRECVENŢĂ
- 3.1. Aspecte generale 20
- CAPITOLUL 4
- PROIECTAREA SISTEMELOR DE REGLARE PE BAZA REACŢIEI DUPĂ STARE
- 4.1. Aspecte generale 23
- 4.2. Alocarea valorilor proprii 24
- 4.3. Studiu de caz 24
- 4.3.1. Ecuaţiile spaţiului stărilor 25
- 4.3.2. Plasarea polilor 27
- 4.3.3. Introducerea unei referinţe la intrare 30
- CAPITOLUL 5
- REGULATOARE P, PI, PD, PID
- 5.1 Aspecte generale 33
- 5.2 Algoritmul de reglare PID 36
- 5.3 Acordarea regulatoarelor 43
- 5.3.1. Criteriul modulului 45
- 5.3.2. Criteriul simetriei 45
- CAPITOLUL 6
- SISTEME ADAPTIVE
- 6.1. Aspecte generale 47
- 6.2. Tehnici de conducere adaptivă 48
- 6.3. Problematica sistemelor adaptive 50
- CAPITOLUL 7
- APLICAŢIE PRIVIND ANALIZA ŞI PROIECTAREA UNEI STRUCTURI DE REGLARE STABILIZATORUL DE RULIU
- 7.1. Prezentarea sistemului 53
- 7.2. Motorul pas cu pas - principii de funcţionare şi comanda 55
- 7.3. Senzorul şi traductorul 61
- 7.4 Sistemul PCL 711B 62
- 7.4.1. Modul de utilizare a plăcii PCL 711B 62
- 7.4.2. Etapele parcurse pentru realizarea unei conversii A/D: 64
- 7.5. Sursa de tensiune comandată 65
- CAPITOLUL 8
- PREZENTAREA ALGORITMILOR DE REGLARE PENTRU SISTEMUL “STABILIZATOR DE RULIU”
- 8.1. Aspecte generale 66
- 8.2 Determinarea răspunsului la treaptă a sistemului ( caz 2 ) 67
- 8.3. Algoritmi de reglare pentru sistemul “stabilizator de ruliu” 71
- 8.3.1. Algoritmul bipoziţional 72
- 8.3.2. Algoritmul de reglare PI 74
- 8.3.3. Algoritm de reglare PI cu parametri variabili 79
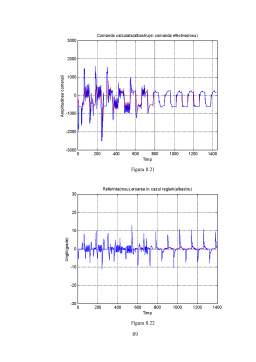
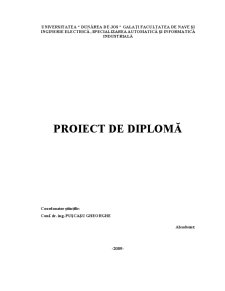
- 8.3.4. Algoritm de reglare PI cu autoacordare 84
- 8.4. Blocul supervizor 93
- ANEXA 97
Extras din proiect
CAPITOLUL 1
PROBLEMATICA SISTEMELOR DINAMICE
1.1. Aspecte generale privind noţiunea de sistem
În general noţiunea de sistem este utilizată în multe domenii de activitate. Prin această noţiune se doreşte să se facă o delimitare a unei forme de existenţă într-un spaţiu bine definit. Pentru a pune în evidenţă aspectele care se regăsesc la un sistem dinamic se dau următoarele exemple: sistemul democratic, sistemul de învăţământ, sistemul nervos, sistemul automat de reglare a temperaturii etc. Se observă faptul că noţiunea de sistem ne ajută, într-o primă fază, să delimităm: un mecanism de conducere a unui stat, un mod de educaţie la nivel naţional, o parte din componentele care contribuie la integrarea organismului uman în mediul înconjurător, respectiv elementele necesare obţinerii unei temperaturi constante într-o incintă, etc.
De regulă un sistem dinamic este bine structurat având conexiuni multiple între părţile sale componente. O altă caracteristică este aceea că elementele sale sunt structurate după aceleaşi criterii sau în vederea realizării aceluiaşi scop. În multe situaţii un sistem poate conţine subsisteme care la rândul lor pot fi privite ca sisteme de sine stătătoare.
În general, ieşirea unui sistem dinamic depinde, atât de evoluţia intrărilor pe un interval de timp, cât şi de relaţiile structurale din interiorul sistemului. Un rol hotărâtor îl au de asemenea şi perturbaţiile externe care pot acţiona o perioadă de timp mai mare sau mai mică.
În ceea ce priveşte reprezentarea proceselor se utilizează modelul matematic care are următoarea formă generală
unde:
fiind mulţimea momentelor de timp;
reprezintă spaţiul comenzilor;
este spaţiul mărimilor de ieşire;
reprezintă spaţiul mărimilor de stare;
f, g sunt funcţii vectoriale de dimensiuni adecvate.
Dacă funcţia f satisface anumite condiţii, atunci ecuaţia
(1.1)
admite o soluţie unică dată prin relaţia
(1.2)
unde reprezintă valoarea iniţială a vectorului de stare, iar reprezintă intrarea pentru
Se observă faptul că vectorul de stare la momentul depinde atât de evoluţia intrării pentru , cât şi de starea iniţială x0.
Funcţia se numeşte funcţia de tranziţie a stărilor şi satisface următoarele proprietăţi:
consistenţa
;
compozabilitate
;
cauzalitate
pentru şi pentru cu
Având în vedere faptul că prin ecuaţia
(1.3)
se pune în evidenţă evoluţia mărimilor de stare, aceasta se numeşte ecuaţia de stare a sistemului, iar ecuaţia:
(1.4)
se numeşte ecuaţia de ieşire a sistemului.
Ecuaţiile (1.3) şi (1.4) pun în evidenţă atât structura internă a unui sistem cât şi conexiunile intrare-stare, respectiv stare-ieşire ale sistemului. Reprezentarea intrare-stare-ieşire a deschis noi direcţii de cercetare, atât în ceea ce priveşte analiza stabilităţii sistemelor dinamice cât şi în ceea ce priveşte sinteza structurilor de reglare care utilizează reacţia după stare.
1.2 Reprezentări ale sistemelor dinamice
În general reprezentările matematice ale sistemelor dinamice sunt corelate cu următoarele aspecte:
1. capacitatea acestora de a aproxima cât mai bine procesul dinamic dat;
2. posibilitatea analizei proprietăţilor sistemului dinamic;
3. posibilitatea implementării unei structuri de reglare pornind de la modelul dat;
4. tipul de reglare implementat de către structura de control;
5. apariţia unor noi tipuri de sisteme inteligente de reglare.
De regulă este de preferat ca modelul obţinut să aproximeze sistemul dat pentru toate situaţiile posibile care pot să apară în timpul funcţionării structurii de reglare. În multe cazuri acest lucru nu este posibil. Problema reglării se rezolvă cu ajutorul structurilor de reglare adaptive, unde modelul utilizat aproximează local dinamica sistemului dat.
Pentru a pune în evidenţă câteva reprezentări ale sistemelor dinamice liniare cu parametrii concentraţi se consideră sistemul dinamic - motorul de curent continuu.
Schema funcţională a sistemului amintit mai sus este dată în figura urmatoare,
Figura 1.1
unde :
u - tensiunea de alimentare a indusului;
J - moment de inerţie (considerat redus la axa motorului);
- - viteza unghiulară ;
mf - cuplul de frecare;
m - cuplul de sarcină;
mm - cuplul electromagnetic;
R - rezistenţa indusului;
L - inductanţa indusului;
e - tensiunea electromotoare;
Φ - fluxul magnetic produs de inductor;
i - curentul prin indus.
Preview document



































































































































Conținut arhivă zip
- COPERTA.doc
- cuprins.doc
- INTRODUCERE.doc
- Sinteza si Analiza Structurilor de Reglare pentru Sistemul Dinamic Stabilizator de Ruliu.doc
- tipla.doc
- tipla1.doc
Alții au mai descărcat și

1. Tema de proiect 1.1. Proiectarea unui sistem de reglare automată de reglarea turaţiei unui motor de curent continuu utilizând regulatoare...

Sa se proiecteze sistemul de reglare automata a vitezei/pozitiei unui motor de c.c. cu excitatie independenta (flux constant), utilizat pentru o...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...