Cuprins
- Etape de proiectare:
- 1.Determinarea raspunsului indicial al procesului.
- 2.Determinarea functiei de transfer a partii fixate .
- 3.Reprezentarea grafica a raspunsului indicial al modelului partii fixate.
- 4.Determinarea functiei de transfer a sistemului in bucla inchisa pe baza performantelor specificate.
- 5.Determinarea functiei de transfer a regulatorului prin:
- -alocare de poli;
- -dead-beat extins;
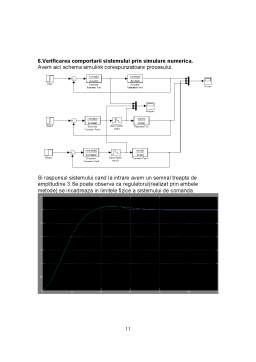
- 6.Verificarea comportarii sistemului prin simulare numerica.
- 7.Verificarea comportarii sistemului in bucla inchisa in timp real(pe instalatie).
Extras din proiect
Sa se proiecteze un regulator numeric astfel incat sistemul in bucla inchisa sa satisfaca urmatoarele performante:
-eroare stationara nula;
-suprareglare mai mica de 5%;
-durata regimului tranzitoriu 60s;
1.Determinarea raspunsului indicial al procesului
Pentru a determina raspunsul indicial al procesului trebuie sa folosim doua trepte ale semnalului de referinta deoarece sistemul are o zona de insensibilitate si raspunsul nu este relevant(vom folosi o treapta de la 0 la 2.5 V).Pentru identificare vom folosi o treapta de la 2.5 la 5 V si vom extrage doar partea care ne intereseaza.
Raspunsul indicial este necesar pentru determinarea partii fixate a procesului.
Codul pentru extragerea datelor pentru identificare
t1=0:1:497;
for i=503:1:1000
out(i-502)=out0(i)-out0(503);
end
plot(out)
grid
Determinarea functiei de transfer a partii fixate
Functia de transfer va fi de forma:
G=K/T*s+1
K-factorul de amplificare(raportul dintre variatia iesirii si variatia intrarii)
T-constanta de timp a procesului
3.Reprezentarea grafica a raspunsului indicial al modelului partii fixate.
t=0:1:499;
num=[k];
den=[T 1];
gf=tf(num, den); % functia de transfer a partii fixate
gf_out_sim=lsim(gf,2.5*ones(1,length(t)),t);
figure
plot(t,gf_out_sim,'-r');
4.Determinarea functiei de transfer a sistemului in bucla inchisa pe baza performantelor specificate.
Functia de transfer in bucla inchisa este de forma:
G(s)=k/T^2*s^2+2*T*ξ+1=k*ωn^2/s^2+2*ωn*s* ξ+ ωn^2
Codul Matlab pentru calculul acestei functii:
T_impus = 60;
ts = 5.
Preview document














Conținut arhivă zip
- Sisteme Automate cu Esantionare - Reglarea Temperaturii.doc
Alții au mai descărcat și

In cele ce urmeaza, vom studia modul in care poate fi implementat un compensator fuzzy pe un DSP fabricat de Texas Instruments si anume TMS320C14....

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

Introducere Corpul uman este un sistem ierarhizat ce dispune de sisteme de autoreglare integrate. Deşi majoritatea funcţiilor sunt îndeplinite de...

Introducere Automatizarea unui proces tehnologic constă în dotarea instalației în care acesta se desfășoară cu mijloace tehnice necesare și...

1. Introducere Automatica este ansamblul metodelor şi mijloacelor de realizare a unor legături (corelaţii) intre diferite elemente şi instalaţii...