
Extras din proiect
Introducere
Dispozitivele de apucare (DA) reprezintă veriga finală din alcătuirea unui robot industrial, a manipulatoarelor şi a altor dispozitive automate, realizând ca funcţie principală apucarea (prinderea) obiectului de lucru (OL), menţinerea acestuia fără pierderea orientării relative în timpul transportului şi desprinderea la sfârşitul ciclului.
După modul în care acţionează asupra obiectului, dispozitivele de apucare pot fi cu cleşte, cu degete, cu vid, cu elemente elastice şi electromagnetice. În raport cu tipul şi dimensiunile obiectelor de lucru aceste dispozitive sunt speciale (utilizate pentru obiecte de aceeaşi formă şi mărime), specializate (pentru obiecte de aceeaşi formă şi dimensiuni diferite), universale (pentru obiecte de formă şi dimensiuni diferite, ce variază într-un câmp limitat) şi flexibile (folosite pentru obiecte având formă şi dimensiuni diferite). Toate aceste variante pot fi prevăzute cu senzori de forţă.
Funcţiile şi cerinţele impuse DA vor conduce la o construcţie ce va trebui adaptată OL, cât şi tipului şi destinaţiei concrete impuse de RI. Obiectele de lucru pot fi semifabricate, piese şi subansamble, scule de uz general în cazul manipulatoarelor din „camerele fierbinţi“ din uzinele nucleare, scule de aşchiere în cazul centrelor de prelucrare, alte obiecte şi subansamble specifice RI.
Funcţia de prindere este, în general, asigurată prin efect mecanic, fiind însă utilizate şi DA cu prindere cu vacuum, cu magneţi sau electromagneţi. DA mecanice, la care forţa de strângere este aplicată OL cu ajutorul unor degete, denumite şi Mâini Mecanice (MM), se bucură de cea mai largă răspândire, date fiind avantajele pe care le prezintă: siguranţa, buna centrare, posibilitatea manipulării sarcinilor mari, funcţionarea în medii agresive.
Forma, dimensiunile şi masa OL, cât şi proprietăţile sale mecanice determină, de asemenea, construcţia DA.
În ceea ce priveşte forma OL, cele mai răspândite sunt piesele cilindrice (cazul nostru) şi cele prismatice, deşi se pot ivi aplicaţii din cele mai diferite, cum ar fi, de exemplu DA utilizat pentru asamblarea lanţurilor.
Prinderea prin efect mecanic se asigură în marea majoritate a cazurilor prin formă şi forţă (forţe de strângere şi frecare), prinderea numai prin formă (de exemplu cu ajutorul cârligelor), nefiind specifică RI.
Forţa de strângere este realizată prin dispozitivul propriu de acţionare al DA, situaţiile în care strângerea provine din greutatea proprie a OL sunt, de asemenea nespecifice RI.
DA mecanice, la care forţa de strângere este aplicată OL cu ajutorul unor degete, denumite şi mâini mecanice (MM), se bucură de cea mai largă răspândire, dat fiind avantajele ce le prezintă: siguranţă, bună centrare, posibilitatea manipulării sarcinilor mari, funcţionarea în medii agresive.
Cele mai răspândite MM de uz general sunt construcţii cu două degete, fiind însă utilizate şi MM cu trei degete, în cazul unor cerinţe strânse privind precizia prinderii sau a manipulării sarcinilor mari.
Asigurarea flexibilităţii MM, la diferite dimensiuni şi forme ale OL, se poate face prin reglarea bacurilor sau schimbarea lor, existând şi posibilitatea utilizării unor bacuri cu suprafaţă de prindere adaptabilă formei OL. Un înalt grad de flexibilitate se poate obţine prin utilizarea MM la care degetele rigide portbac sunt înlocuite cu degete deformabile executate din elemente elastice sau din segmente articulate.
Mecanisme utilizate în structura mâinii mecanice MM
Prinderea OL în DA se face prin mişcare sincronă, corelată, a doua sau trei degete port-bac, în acest fel realizându-se atât centrarea OL faţă de DA cât şi preluarea forţelor transversale. Asigurarea mişcării sincrone a degetelor se obţine prin folosirea unui motor liniar şi realizarea de structuri cinematice identice pentru mişcarea degetelor (braţelor). Mecanismele folosite în construcţia DA şi care folosesc, în general patru elemente, pot fi grupate în patru mari categorii:
1. cu patru cuple de rotaţie;
2. cu două cuple de translaţie dispuse la elementele diferite;
3. cu o singură cuplă de translaţie;
4. cu două cuple de translaţie aşezate pe acelaşi element;
Acţionarea mâinilor mecanice MM
Criteriul reducerii gabaritului şi al greutăţii DA face ca natura şi tipul acţionării să fie, în general independent de acţionarea celorlalte unităţi ale robotului industrial.
Acţionarea pneumatică este cea mai folosită pentru RI cu acţionarea principală pneumatică sau electrică. Acţionarea pneumatică şi în special cea cu cilindru, este preferată în aceste cazuri, datorită simplităţii, preţului relativ scăzut, vitezei mari de lucru, precum şi a unui raport forţă-masă proprie mai bun ca al acţionării electrice.
Folosirea unui cilindru cu dublu efect, deşi mai scump faţă de unul cu simplu efect, atât în ceea ce priveşte construcţia, cât şi comanda, se pretează atunci când sunt necesare curse lungi, constanţa forţei pe cursă sau limitarea dimensiunii axiale.
Acţionarea hidraulică se întâlneşte numai când şi RI este acţionat hidraulic, astfel încât preţul de cost nu justifică introducerea sa, cu toate că cilindrul hidraulic de acţionare asigură un gabarit redus.
Acţionarea electrică se întâlneşte mai rar decât cea pneumatică datorită dezavantajului prezenţei regulatoarelor de turaţie, care, împreună cu motorul electric, conduce la mase proprii relativ mari.
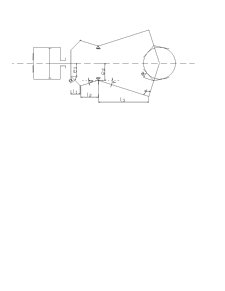
Schema cinematică a mâinii mecanice MM
Evolutia mainilor mecanice
Exemple
Timp de secole oamenii şi-au folosit corpul şi în special mâinile ca inspiraţie şi model pentru creaţiile inginereşti. Dar copierea mainii umane nu este asa de simpla pe cat pare, structura musculară si scheletica a maini oferă un echilibru unic si greu de egalat, mana este stabilă si precisă dar in acelaşi timp rapidă şi flexibila.
In ciuda complexitatii problemei, multi proiectanti de roboti au apelat la nenumarate inovatii din diverse discipline aducandu-ne tot mai aproape de mana complet automatizata. considerata a fi prima mana robotizata funcţională, Handyman, dezvoltată în 1960 de către Ralph Mosher pentru General Electric. Aceasta mana era o gheară cu doua degete, robust articulată, dar aceasta a asezat fundatia pentru urmatoarele incercari.
Designul abordat pare rudimentar acum insa segmentele cu 5 grade de liberatate ale degetelor ce încearcă sa imite degetele umane rămîn în continuare o mare inovatie. mana umana este alcatuita dintr-un set de legături rigide (oase, muschi) conecate prin articulatii. fiecare articulatie are un grad de libertate (rotaţie sau translaţie) sau doua (rotative sau cilindrice) . avem patru grade de libertate în fiecare deget ceea ce ne da o mare flexibilitate si abilitatea de a executa mişcări complicate.
Preview document




















Conținut arhivă zip
- Sisteme de Conducere in Robotica -Maini Mecanice.doc
Alții au mai descărcat și

Argument Ştiinţa este un ansamblu de cunoştinţe abstracte şi generale, fixate într-un sistem coerent obţinut cu ajutorul unor metode adecvate şi...

Tema proiectului Sa se proiecteze un sistem de actionare cu motor electric pas cu pas pentru mecanismul prezentat in figura 1 Fig.1 Unde MPP -...

4.1Introducere ELEMENTE CONSTRUCTIVE SI DE CALCUL ALE ROBOŢILOR INDUSTRIALI Construcţia RI trebuie sa răspundă cerinţelor funcţionale de...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

Elementele de executie sunt componente ale sistemelor automate care primesc la intrare semnale de mica putere de la blocul de conducere si...

1. CONVERTOARE NUMERIC-ANALOGICE Convertoarele de tip numeric-analogic sunt dispozitive care au rolul de a transforma informaţiile date sub formă...

Capitolul 1 INTRODUCERE ÎN STUDIUL SISTEMELOR AUTOMATE 1.1. Concepte, metode şi principii Ramura ştiinţei care se ocupă cu studiul metodelor şi...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...
Te-ar putea interesa și

1.Generalitati. Incercarile de obtinere a unor noi materiale superperformante au condus la dezvoltarea unei clase de produsi cunoscuti sub...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

GENERALITĂŢI 1 MATERIALE CU MEMORIA FOMEI 2 MATERIALE INTELIGENTE 3 Materiale inteligente – DEFINITII, CONCEPTE 3 Materiale inteligente -...

Argument Caracteristica de bază a unui sistem robotic este mişcarea robotului în cicluri reprogramabile şi capacitatea acestuia de a schimba,...

1. INTRODUCERE 1.1 Conceptul de mecatronica : definitie; modele Termenul mecatronica (MECAnica + elecTRONICA) a fost conceput în 1969 de un...

Capitolul 1 INTRODUCERE ÎN PROBLEMATICA SISTEMELOR DE CONDUCERE Robotul industrial reprezinta în momentul de fata punctul de intersectie al...