Cuprins
- 1. Introducere
- 1.1. Introducere în contextul sistemelor de conducere
- 1.2. Introducere în Structuri Multimodel.
- 2. Structuri Multimodel. Probleme specifice Structurilor Multimodel
- 2.1. Structuri Multimodel
- 2.2. Metodologia de proiectare a Sistemelor Multimodel. Probleme specifice
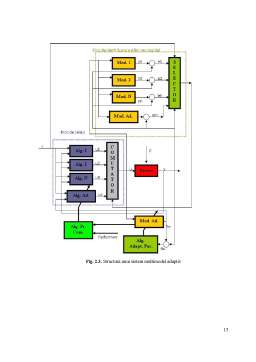
- 2.3. Variante structurale pentru îmbunãtãtirea performantelor Sistemelor Multimodel
- 2.3.1. Sisteme Multimodel Adaptive
- 2.3.1.1. Sistem Multimodel Adaptive cu un model adaptiv (liber sau cu
- reinitializare)
- 2.3.1.2.Sistem adaptiv multimodel cu un model adaptiv liber si un model cu
- reinitializare
- 2.3.1.3. Sistem adaptiv multimodel cu un model adaptiv liber si un model cu
- reinitializare
- 2.3.1.4.Sistem adaptiv multimodel cu n modele adaptive (cu reinitializare)
- 2.3.2. Sisteme Multimodel Robuste
- 2.3.3. Sisteme Multimodel cu Blocuri pentru Compensarea Neliniaritãtii Modelelor
- 3. Determinarea optimã a numãrului de modele/algoritmi 3-20
- 4. Solutii pentru selectarea celui mai bun model – algoritm 4-23
- 5. Solutii pentru comutarea algoritmilor
- 5.1. Probleme practice ale functionãrii regulatoarelor numerice
- 5.1.1. Introducere
- 5.1.2. Consideratii de ordin practic ale implementãrii regulatorului numeric
- 5.2. Comutarea manual/automat (M.A)
- 5.3. Rezultate practice de implementare
- 6. Stabilitatea Sistemelor Multimodel 6-38
- 7. Exemplu de Sistem de Conducerea Adaptivã Multimodel
- 8.1 Tipul procesului studiat
- 8.2 Procese de umplere-golire
- 8. Concluzii 8-47
- 9. Bibliografie 9-48
Extras din proiect
1. INTRODUCERE
1.1. Introducere în contextul sistemelor de conducere
Procesele automatizate de la care se pretind specificatii dorite ca profitabilitatea, calitatea,
siguranta, impactul asupra mediului, costul etc., presupun colaborare interdisciplinarã a expertilor
si cercetãtorilor din domenii precum: teoria sistemelor, tehnologia prelucrãrii sistemelor si
transmiterii informatiilor, ingineria reglãrii / conducerii , calculatoare, instrumentatie, etc. Fiecare
din aceste domenii contribuie la dezvoltarea conceptualã si realizarea practicã a sistemelor de
conducere automatã a proceselor.
Automatica a apãrut si s-a dezvoltat, în special, prin intermediul conceptelor si
formalismului matematicii moderne devenind una dintre cele mai teoretizate, complexe si atractive
stiinte ingineresti. Teoria sistemelor dinamice a cunoscut o evolutia importantã bazatã pe rigoarea
matematicã a teoremelor si demonstratiilor, permitând aparitia de instrumente, tehnici si metode
exacte pentru analiza si sinteza sistemelor de control automat. Domenii din Automaticã care
apeleazã la suportul complex al matematicii ar fi: modelarea, identificarea si comanda sistemelor,
prelucrarea semnalelor, etc.
Controlul automat opereazã cu reprezentãrile abstracte ale modelelor matematice pentru
procesul fizic sau obiectul conducerii si pentru dispozitivul de reglare (regulator).
Modelul procesului este caracterizat printr-un grad ridicat de generalitate, în sensul cã
trebuie sã fie valabile pentru o gamã largã de valori ale mãrimilor de intrare, descriind comportarea
procesului pe întreaga plaja de functionare. Modelul matematic adoptat trebuie sã aibã o structurã
suficient de complexã pentru a surprinde dinamica procesului, dar suficient de simplã pentru a
facilita proiectarea convenabilã a strategiilor de conducere automatã. Deseori modelul procesului
este privit ca o reprezentare comprimatã a datelor de achizitie si exprimã prin structura si parametrii
comportamentul dinamic al acestuia. În evaluarea modelului un rol important este jucat de
experienta în exploatare si de cunoasterea cât mai completã a legilor si fenomenelor ce guverneazã
evolutia procesului.
Modelul dispozitivului de reglare, adicã algoritmul de comandã, se determinã pe baza
modelului procesului si a cerintelor de performantã impuse.
Procesele cu complexitate tehnologicã crescutã prin sistemele de conducere dezvoltate oferã
functii suplimentare ca: optimizare, gestionarea alarmelor si luarea unor mãsuri de protectie si
securitatea functionãrii.
Sistemele de control automat intrã în conexiune cu sisteme mecanice, electronice,
informatice formând configuratii integrate de tip mecatronic, multifunctional.
Sistemele de control automat sunt orientate tot mai mult spre aplicatii practice, unde
eficienta actului de conducere se apreciazã prin performantele obtinute în instalatiile si procesele
tehnologice.
Echipamentele de calcul moderne oferã un suport puternic functiilor specifice ale sistemelor
de conducere cum ar fi: achizitii si transmisii de date, identificarea si proiectarea comenzii,
monitorizare, optimizare si diagnozã. Evolutia tehnicii de calcul a evaluat considerabil oferind
putere de calcul extraordinarã si facilitãti hardware-software uneori neutilizate la preturi scãzute.
În acest context dinamic, atât d.p.d.v. al fundamentelor teoretice cât si din cel al resurselor
hardware si software sunt propuse noi solutii în conducerea automatã a proceselor, inclusiv în cele
neliniare care fac obiectul acestei lucrãri.
Preview document

















































Conținut arhivă zip
- Sisteme de Conducere Multimodel.pdf
Alții au mai descărcat și

CAPITOLUL 1 Modelare si strategii de conducere a manipulatoarelor robotice 1.1. Introducere în problematica robotilor industriali Notiunea de...

1. Tema proiectului Se va proiecta sistemul de automatizare pentru o locuinta individuala structurata pe doua niveluri: parter si etaj. In...

1. Ball and beam Sistemul „ball and beam” este unul dintre cele mai populare modele pentru lucrul in laborator in domeniul controlului de...

CAPITOLUL 1 INTRODUCERE Evolutia coplesitoare a tehnicii din ultimii ani, in special din ultimul deceniu, a dus, inevitabil, si la dezvoltarea...

Cuvântul „simulare” derivă din latinescul „simulatio”, care înseamnă capacitatea de a reproduce, reprezenta sau imita ceva. În matematică ,...

1) Introducere in identificarea sistemelor. Începând cu seminarul iniţiat de Kalman (1960) majoritatea covârşitoare ale aplicaţiilor de control au...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...
Te-ar putea interesa și

În evoluţia sa omenirea a fost preocupată de realizarea unor dispozitive, mijloace tehnice, care să solicite cât mai puţin prezenţa omului pentru o...