Cuprins
- I. Introducere
- II. Motorul pas cu pas
- III. Dispozitivul LCD (HITACHI HD44780)
- IV. Microcontrolerul AduC812
- V. Bibliografie
- Anexa 1 Programul ASM
- Anexa 2 Schema electrica(ORCAD)
Extras din proiect
I. INTRODUCERE
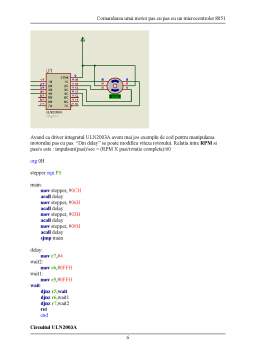
Punctul de pornire al acestui proiect este cerinta de proiectare a unui sistem de comanda pentru motorul pas cu pas folosind un microcontroler din familia 8051. Microcontrolerul 8051 ales este AduC812. Microcontrolerul va avea la Portul P1 butoanele de comanda. Sunt patru butoane de comanda avand fiecare un rol.Astfel primul buton este de pornire, la apasarea celui de-al doilea buton viteza motorului va creste, la apasarea celui de-al treilea buton viteza motorului se va micsora, iar cel de-al patrulea buton este pentru oprire. Reamintim ca butoanele sunt conectate la portul 1. Motorul pas cu pas va fi comandat prin portul P0.Motorul pas cu pas este cu patru pasi. In sfarsit portul 2 al microcontrolerului Aduc812 este folosit de dispozitivul LCD, mai precis pentru transferul datelor ce trebuiesc afisate. In acest proiect se va afisa viteza cu care ruleaza motorul. Pentru interfatarea dispozitivului LCD se mai folosesc cativa pini de la portul 3. In scurte cuvinte avem un microcontroler ce comanda un motor pas cu pas, comanda mijlocita si de cele 4 butoane pe care le folosim, iar actiunile motorului sunt monitorizate pe dispozitivul LCD. Ar mai trebui amintit microcontrolerul nu poate asigura necesarul de putere pentru motor si in acest sens este ajutat de circuitul ULN2003A. De asemenea mai amintim ca se foloseste o sursa stabilizata.
II. MOTORUL PAS CU PAS
INTRODUCERE
Un motor pas cu pas este un dispozitiv digital care converteste informatia digitala(impulsuri) intr-o miscare de rotatie(pasi de rotatie). In Figura 1 unui impuls ii este echivalent un pas, iar in Figura 2 unui numar de impulsuri ii este echivalent un numar de pasi. Fiecarui impuls ii corespunde un pas, adica o portiune dintr-o rotatie completa. Pasul se masoara in grade deoarece corespunde unui anumit unghi. De exemplu un pas poate fi de 90 de grade.Asta inseamna ca vom avea 4 pasi pentru o rotatie completa(360 de grade). Cu cat avem mai multi pasi, cu atat avem o precizie mai bune. Eroarea la un motor pas cu pas nu se cumuleaza.
Motorul pas cu pas transforma impulsurile dreptunghiulare in miscari de rotatie. Pe langa ca numarul de impusuri ne da numarul de pasi/rotatii frecventa impulsurilor (cum era de asteptat de altfel) ne da viteza motorului.
Intre pasi motorul isi mentine pozitia fara a avea nevoie de franare.Motoarele pas cu pas pot fi bidirectionale, pot sa-si schimbe rapid acceleratia si pot fi oprite cu usurinta. Motoarele pas cu pas lucreaza fara feedback, in bucla deschisa.Motoarele pas cu pas sunt folosite la sistemele servo, la imprimante, copiatoare, unitati de disk.Motoarele pas cu pas pot fi de mai multe feluri: cu rezistenta variabila, cu magnet permanent si hibride.Ne vom ocupa de cele cu magnet permanent. Motoarele pas cu pas cu magnet permanent au ca rotor un magnet permanent fara dinti magnetizat perpendicular fata de axa rotorului.)O secventa(rotatie completa) are 4 faze(pasi).Sensul de rotatie este sensul acelor de ceas.Sensul este dat de ordinea de transmitere a fazelor de biti. Rotorul este stabil intre cei doi poli ai statorului.
PASUL
Daca dorim un sens de rotatie trigonometric pur si simplu schimbam fazele de transmisie a bitilor dupa cum urmeaza:
and controlati in urmatoarea ordine:
PASUL
(exemplul a fost 2 phase unipolar stepper motor)Motoarele pas cu pas unipolare(ca si in cazul de fata) au 5 sau 6 fire si patru infasurari. Doua infasurari au un fir comun de alimentare.
Preview document

























Conținut arhivă zip
- Comandarea unui Motor Pas cu Pas cu un Microcontroler 8051.doc
Alții au mai descărcat și

CAPITOLUL 1 Sisteme de reglare pentru acţionări electrice 1.1 Sisteme cu buclă deschisă şi bucla închisă Sistemele de control, în general, pot...

INTRODUCERE Cuvânt înainte Am ales această temă deoarece sunt pasionat de fotbal şi de roboţi şi ca totul să decurgă bine m-am gândit să îmbin...

I. GENERALITĂŢI I.1. Sistemele de acţionare Prin element de acţionare electrică se înţelege un motor electric ce urmăreşte un semnal de comandă...

1.Consideraţii teoretice Sistemele de acţionare sunt compuse dintr-un element de acţionare, dintr-un dispozitiv de lucru (mecanism acţionat) şi...

Tema proiectului Sa se proiecteze un sistem de comanda a unui motor de curent continuu cu ajutorul unui microcontroler din familia 8051, care sa...

Actionarea unui motor pas cu pas cu jumatate de pas pe functionare dubla folosind microcontroler PIC12F675 Motorul electric pas cu pas (MPP) este...

Noţiuni introductive Motorul pas cu pas (MPP, stepper motor, stepping motor) este un motor electric sincron fără perii care divide o rotaţie...
