
Extras din proiect
Sa se proiecteze un sistem cu logica fuzzy care sa permita controlul automat al frecventei la un radioreceptor.
Cerinte:
- Avem nevoie de o variabila numita abaterea frecventei (
- Avem nevoie de o variabila numita viteza de variatie a abaterii notata cu
- Abaterea frecventei trebuie sa aiba o valoare cat mai mica
- Frecventa trebuie sa fie in jurul lui pentru ca sa fie cat mai stabila (Vezi figura 1 de mai jos)
Date initiale:
Sistemul va fi alcatuit din :
- Un generator de semnal cu ajutorul caruia vom da diferite semnale (sinusoidal, triunghiular, random)
- Un bloc de derivare pentru viteza de variatie a abaterii
- Doua blocuri de saturatie pentru a limita intr-un domeniu ales de noi atat abaterea frecventei cat si viteza ei de variatie
- Un MUX 2 la 1 pentru a introduce ambele variabile in controller-ul fuzzy
- Un controller fuzzy
Pentru controlul automat al frecventei sau CAF trebuie tinut cont de urmatoarea ecuatie:
De asemenea atunci cand alegem eroarea sau abaterea frecventei pentru CAF trebuie sa respectam urmatorul grafic (Figura 1) si de ecuatiile pentru abaterea frecventei si viteza ei de variatie:
Figura 1. Controlul automat al frecventei
(abaterea)
(viteza de variatie a abaterii)
Pentru controlul automat al frecventei sau CAF vom apela la proiectarea cu logica fuzzy astfel:
1. Intelegerea relatiilor cauze efect (fenomenul adica in cazul meu ca frecventa sa fie cat mai stabile variabila de abatere trebuie sa fie cat mai mica pentru ca frecventa sa se mentina in apropiere de f0)
2. Intram in Matlab si scrie comanda fuzzy in fereastra principala si adaugam cate variabile avem nevoie in controller cu Add Variabile din submeniul Edit
3. Se stabilesc variabilele de intrare si de iesire si se introduc in fuzzy in Matlab
4. Se alege domeniul de definitii pentru toate variabilele pe care le avem in sistem
5. Se introduc domeniile sau intervalele pentru toate multimile fuzzy (mf) cin campul de range din Simulink
6. Se creeaza regulile in fuzzy conform tabelului de logica si se introduce in Rules in Matlab
7. Se verifica daca regulile functioneaza din View->Rules inainte de a construi modelul Simulink si in caz ca nu sunt corecte se verifica de unde e problema si se adapteaza
8. Se genereaza fisierul fis cu File->Export->To Workspace.
9. Se creeaza modelul simulativ in Simulink si se introduce fisierul din aplicatiile fis in controllerul fuzzy iar apoi luam cateva scenarii sa vedem daca sistemul functioneaza corect.
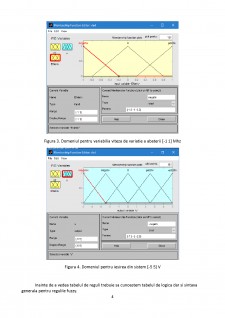
Implementarea sistemului cu logica Fuzzy (aplicatiile FIS)
Aici voi prezenta controllerul fuzzy impreuna cu variabilele de intrare si de iesire, definirea domeniilor pentru toate variabilele inclusiv pentru ce-a de iesire cat si regulile asa cum se poate observa in figurile de mai jos:
Preview document











Conținut arhivă zip
- Sisteme electronice pentru conducerea proceselor industriale.docx
Alții au mai descărcat și

Simularea unei acţionări cu motor de curent continuu cu excitaţie derivaţie Autori: • student an III AIA, UAV Arad • student an III AIA, UAV...

În mod obișnuit, termenul Luminozitate ar trebui să fie folosit numai pentru referințe necorespunzătoare la senzațiile fiziologice și la...


3. Functionarea În general, pentru realizarea stabilizatoarelor de tensiune se folosesc proprietatile diodelor. Cel mai simplu tip de...
Te-ar putea interesa și

CAP. 4. REALIZARE PRACTICA 4.1 Proiectarea cablajelor imprimate 4.1.1 Generalitati Utilizarea cablajelor imprimate constituie actualmente...

1.NOŢIUNI GENERALE DE COMUNICAŢII PRIN SATELIT 1.1.DESCRIEREA SATELITULUI 1.1.1. Introducere În aceasta secţiune se va descrie un satelit de...

Capitolul I.NOŢIUNI DE BAZĂ DESPRE RECEPTOARELE RADIO Receptoarele radio sunt formate dintr-un un ansamblu de circuite electronice destinate...

Norme de sanatatea si securitatea muncii necesare la lucrarile practice efectuate in laboratorul de electronica 1.Laboratorul trebuie sa fie...

Scopul lucrării: 1.1 Studierea staţiei de bază BD-28N pentru reţeua celulară de comunicaţii mobile în standardul NMT-450i . 2 Îndeplinirea...