Extras din proiect
Introducere
Masinile si vehiculele au fost introduse in societate drept una dintre cele mai eficiente, usoare si accesibile mijloace de transport existente. Dar in timp ce este un convenabil mijloc de transport in comun, este deasemenea si un mod de transport incredibil de periculos. Mii de oameni mor in accidente auto in fiecare an, fie ca este o coliziune cu un alt automobil, sau un obiect imobil.
O metoda de detectare din timp a posibilelor coliziuni ar putea evita cateva dintre accindentele care sunt legate de factori precum pierderea controlului, condus neglijent, soferi adormiti/in stare de ebrietate, si neacordarea atentiei la drum. Desi nu este o caracteristica de siguranta standard la toate masinile de pe piata, utilizarea de echipament senzorial pentru detectarea obiectelor posibil periculoase de la o distanta sigura si incetinirea masinii sau schimbarea directiei catre o directie sigura nu a fost inca lansata.
Proiectul nostru a fost sa luam o masina controlata prin telecomanda si sa adaugam un senzor infrarosu. Simuland un posibil progres in siguranta sistemelor din masini si automobile, masina si senzorul ar fi capabile sa opereze normal pana senzorul ar detecta un posibil pericol. In cazul nostru, masina va merge in fata pana senzorul ar ajunge la aproximativ 10 centimetrii de un obiect, moment in care controlul utilizatorului asupra motorului ar fi oprit, senzorul ar analiza obstacolele pana ar gasii cel mai sigur drum, daca exista vreunul (sau sa dea inapoi daca este cazul), si sa vireze pe acea cale.
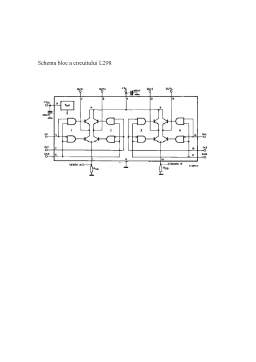
Schema bloc.
In figura de mai jos este prezentata schema bloc a masinii.
Modul de detectare a obstacolelor.
Pentru detectarea obstacolelor am alea sa folosim un sensor IR SHARP GP2Y0D810Z0F,acesta poate detecta obstacole aflate la distante cuprinse intre 5 si 10 cm.,acesta functioneaza la o tensiune de aproximativ 4.5-5.5V si un curent de aproximativ 9mA.
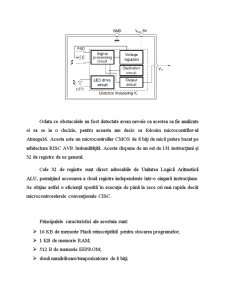
Schema Bloc a Senzorului IR SHARP GP2Y0D810Z0F
Odata ce obstacolele au fost detectate avem nevoie ca acestea sa fie analizate si sa se ia o decizie, pentru aceasta am decis sa folosim microcontrllor-ul Atmega16. Acesta este un microcontroller CMOS de 8 biţi de mică putere bazat pe arhitectura RISC AVR îmbunătăţită. Acesta dispune de un set de 131 instrucţiuni şi 32 de registre de uz general.
Cele 32 de registre sunt direct adresabile de Unitatea Logică Aritmetică ALU, permiţând accesarea a două registre independente într-o singură instrucţiune. Se obţine astfel o eficienţă sporită în execuţie de până la zece ori mai rapide decât microcontrorelerele convenţionale CISC.
Principalele caracteristici ale acestuia sunt:
- 16 KB de memorie Flash reinscriptibil pentru stocarea programelor;
- 1 KB de memorie RAM;
- 512 B de memorie EEPROM;
- două numărătoare/temporizatoare de 8 biţi;
- un numărător/temporizator de 16 biţi;
- convertor analog digital de 10 biţi, cu intrări multiple;
- comparator analogic;
- modul USART pentru comunicaţie serial port serial;
- dispune de un cronometru cu oscilator intern;
- oferă 32 de linii I/O organizate în patru porturi PA, P B, PC, PD.
Se poate observa că există o magistrală generală de date la care sunt conectate mai multe module:
- unitatea aritmetică şi logică ALU;
- registrele generale;
- memoria RAM şi memoria EEPROM
Preview document
















Conținut arhivă zip
- Masina Inteligenta.doc
Alții au mai descărcat și

Ce este GPS ? Sistemul de Pozitionare Globala (GPS) este un sistem de radio-navigatie globala format dintr-o constelatie de 24 de sateliti si...

Punerea la punct a unui sistem pentru determinarea precisă a poziţiei pe glob, a făcut posibilă deschiderea unor noi domenii de aplicare, în afara...

Rezumat Scopul prezentei lucrări este de a informa, de a prezenta unii dintre cei mai complexi senzori – senzorii de poziţie.Folositi din ce în ce...


1. Introducere Procesele industriale, ca şi multe dintre activităţile sociale actuale nu pot funcţiona fără asigurarea unui acces rapid la o...

Sistemul de pozitionare global (GPS) este un sistem global de navigatie prin satelit (GNSS), elaborat de Departamentul Apararii al Statelor Unite....


1. SISTEMUL GPS. NOTIUNI FUNDAMENTALE. Sistemul NAVSTAR GPS a fost proiectat in principal ca un sistem radio de navigare, capabil sa ofere...
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

INTRODUCERE În realizarea proiectului de licenţă cu titlul „Conceptia si proiectarea unui sistem hipermedia pentru educatia continua a adultilor",...

Conceptul de sistem informational economic a fost definit în moduri diferite. De cele mai multe ori, el este sinonim cu sistem informational pentru...

Capitolul 1. FUNDAMENTELE MECATRONICII 1. Conceptul de mecatronica Mecatronica reprezinta o treapta “naturala” in procesul evolutiei proiectarii...

Inteligenţa artificială (IA) s-a născut în urmă cu aproximativ 50 de ani, ca domeniu ştiinţific care încearcă construirea de maşini inteligente şi...

A.EVOLUTIA CALCULATOARELOR Din cele mai vechi timpuri, oamenii au numarat, socotit si masurat lucrurile, le-au trecut pe raboj si au comunicat...

Când s-a vorbit prima data de Inteligența Artificială (AI, Artificial Intelligence) în 1956, totul părea o utopie, un vis prea frumos pentru a fi...

1.VEDEREA NATURALA 1.1. Generalitati Perceptia vizuala este acel proces complex de receptionare, analiza si sinteza a informatiilor care se...