Extras din proiect
In anul 1965 John Kelly si Ben Logan de la eliminarea componentelor zgomotoase. De exemplu, in interiorul unui automobil conversatia este afectata de zgomotul de fond.
O cale de rezolvare a acestei probleme ( obtinerea unui semnal dorit mai bun ) este utilizarea unui filtru simplu de anulare a zgomotului. Oricum, o astfel de abordare ce presupune extragerea semnalului zgomotos ( de la senzorul de referinta ) direct din semnalul de la senzorul primar este menita sa nu aibe
sorti de izbanda, deoarece a aceasta abordare poate chiar conduce, in unele cazuri, la o crestere a puterii zgomotului la iesire.
In cazul in care sunt efectuate previziuni adecvate si operatia de anulare a zgomotului este controlata de un proces adaptiv performantele obtinute pot fi mult mai bune decat in cazul anterior.
Deoarece canalul de transmisie are diferite caracteristici de răspuns în frecvenţă la momente de timp distincte , rezultă că distorsiunile vor fi diferite la momente de timp diferite,deci egalizorul trebuie să-şi modifice coeficienţii în timp (trebuie să aibă coeficienţi ajustabili). Din acest motiv egalizorul se mai numeşte şi egalizor adaptiv sau generic filtru adaptiv.
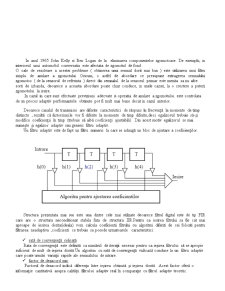
Un filtru adaptiv este de fapt un filtru numeric la care se adaugă un bloc de ajustare a coeficienţilor.
Structura prezentata mai sus este una dintre cele mai utilizate deoarece filtrul digital este de tip FIR care are o structura neconditionat stabila fata de structura IIR.Pentru ca iesirea filtrului sa fie cat mai aproape de iesirea dorita(ideala) vom calcula coeficientii filtrului cu algoritmi diferiti de cei folositi pentru filtrarea neadaptiva ,coeficienti ce trebuie sa posede urmatoarele caracteristici:
- rată de convergenţă ridicată
Rata de convergenţă este definită ca numărul de iteraţii necesar pentru ca ieşirea filtrului să se apropie suficient de mult de ieşirea dorită.Un algoritm cu rată de convergenţă ridicată conduce la un filtru adaptiv care poate urmări variaţii rapide ale semnalului de intrare.
- factor de dezacord mic
Factorul de dezacord indică diferenţa între ieşirea obtinută şi ieşirea dorită .Acest factor oferă o informaţie cantitativă asupra calităţii filtrului adaptiv real în comparaţie cu filtrul adaptiv teoretic.
- robusteţe
Se referă la capacitatea algoritmului de a opera satisfăcător la o gamă diversă de secvenţe de
intrare (semnale deterministe sau semnale aleatoare cu caracteristici statistice diferite).
- cerinţe de calcul reduse
Se referă la numarul de operaţii necesare pentru implementare(adunări,scăderi, înmulţiri, împărţiri) la capacitatea de memorie necesară pentru structura de date a algoritmului şi la efortulde programare necesar implementării algoritmului pe calculator.
- structura simplă
Algoritmul trebuie să fie modular şi cu un grad ridicat de paralelism (pentru a putea fi uşor realizat hardware în tehnologie VLSI)
- senzitivitate redusă la cuantizarea coeficienţilor
Dacă algoritmul se implementează numeric pe calculator atunci trebuie să fie puţin dependent de cuantizarea cantităţilor cu care se operează în caz contrar funcţionarea devine incorectă sau chiar instabilă.
ALE (Adaptive Line Enhancer)
Structura ALE este prezenta in figura urmatoare:
Preview document



















Conținut arhivă zip
- Metode de Eliminare a Zgomotului.doc
Alții au mai descărcat și

Argument Acest proiect proiect are ca tema :Relee electronice de timp. L-am ales deoarece mi s-a parut o tema interesanta. O parte din notiuni...

I. CEASUL ELECTRONIC Ceasul este format din: - Oscillator cu cuart pe frecventa de 1 Hz (inima). E greu insa sa faci un oscillator pe 1 Hz sau...

A. Tema proiectului: Sa se proiecteze un oscilator generator de pulsuri dreptunghiulare cu urmatoarele caracteristici: - Frecventa de oscilatie...

Capitolul II Principii generale Amplificatoare in tehnica de microunde Ingineria microundelor este un domeniu al fizicii ce se ocupa cu...

Tema proiectului Se cere sa se realizeze din punct de vedere hardware si software un sistem cu procesor DSP - ADSP2181 care sa implementeze o...

1. DESTINATIE Sistemul de electroalimentare are rolul de a asigura in permanenţă alimentarea cu energia necesară a elementelor de transmisiuni şi...

Principiul de functionare al aparatelor de măsurat digitale constă în transformarea mărimii de măsurat, de obicei analogice, în semnale digitale,...

CAPITOLUL I Considerente asupra alegerii lucrarii Amplificatorul este un ansamblu de circuite electronice avand scopul de a marii semnalul audio...
Te-ar putea interesa și

Imaginile sunt și un concept cu caracter informațional. Oamenii primesc pe cale vizuală cea mai mare parte din informația pe care sistemul lor...

Rezumat: Studiul prezintă efectele negative ale zgomotului asupra lucrătorilor din industria de construcţii, precum şi sursele de zgomot pe...

I. Informaţii anamnestice şi explorare restrânsă Pacienta este o adolescentă de 15 ani, elevă în clasa a-IX-a, la un liceu dintr-un mare oraş....

1.Recunoasterea probelor 1.1 Introducere Introducerea în prezent a instrumentelor analitice moderne permit producerea de cantități mari de...

INTRODUCERE Problemele de pierdere a auzului cauzate de zgomot reprezintă una dintre cele mai frecvente 10 boli profesionale întâlnite în Uniunea...

INTRODUCERE Tema de fata isi propune sa dezbata anumite probleme legate de transmiterea vocii la distanta, cu ajutorul aparatelor de telefonie...

Acest referat prezinta fundamentele folosirii hardware-lui de conditionare a semnalului folosit cu sistemele DAQ pe baza de calculatoare. Sunt...

CAPITOLUL 1 INTRODUCERE Domeniul procesării de imagini reprezintă o gamă largă de metode, algoritmi ce pot fi optimizați. Evident că scopul...