Extras din proiect
Acest proiect este un dispozitiv care masoara viteza in special a unei biciclete dar nu numai, de fapt a oricarui vehicul care se deplaseaza pe roti. Principiul este simplu, la roata se foloseste un sensor REED, se fixeaza acest senzor pe bicicleta iar pe roata un magnet, iar cand roata se invarte si se ajunge la puntul unde se afla magnetul se inchide circuitul se se genereaza un semnal pentru uC care este prelucrat dupa aceea. Acest semnal este legat la portul PD2 si se foloseste in mod intrerupere pe pantra crescatoare a semnalului. La prima intrerupere se porneste timerul 1 iar la urmatoarea intrerupere se opreste si se masoara timpul 1 rotatii. Cunoscunduse perimetrul roatei se poate calcula viteza, care este apoi afisata pe un dispozitiv LCD.
1. Introducere
Microcontrolerele din familia AVR fac parte din categoria microcontrolerelor de 8 biti performante. Nucleul RISC al acestora este optimizat pentru viteză, executarea majorităţii instrucţiunilor se face într-un singur ciclu de ceas, astfel pentru 1MHz se poate obţine 1MIPS (mega instrucţiune pe secundă).
Microcontrolerele AT90Sxxxx: sunt microcontrolerele de performaţă medie, viteză maximă este de 10MHz (10MIPS).
Caracteristica generală a microcontrolerelor AT90S2313:
Arhitectură RISC de 8 biţi,118 instrucţiuni (majoritatea fiind executate într-un singur ciclu de ceas), frecvenţă maximă de operare este 10MHz. Pentru operare pot fi utilizate cele 32 registre de 8 biţi de lucru. Memoria de program la AT90S2313 este de 2KByte şi cel de date este de 128 Byte. Acest microcontroler este dotat şi cu o memorie EEPROM de 128 Bytes.
- Peripheral Features
– One 8-bit Timer/Counter with Separate Prescaler
– One 16-bit Timer/Counter with Separate Prescaler,
Compare, Capture Modes and 8-, 9-, or 10-bit PWM
– On-chip Analog Comparator
– Programmable Watchdog Timer with On-chip Oscillator
– SPI Serial Interface for In-System Programming
– FullDuplexUART
- - Special Microcontroller Features
– Low-power Idle and Power-down Modes
– External and Internal Interrupt Sources
- - Specifications
– Low-power, High-speed CMOS Process Technology
– Fully Static Operation
- Power Consumption at 4 MHz, 3V, 25°C
– Active: 2.8 mA
– Idle Mode: 0.8 mA
– Power-down Mode: <1 µA
- I/O and Packages
– 15 Programmable I/O Lines
– 20-pin PDIP and SOIC
- Operating Voltages
– 4.0 - 6.0V (AT90S2313-10)
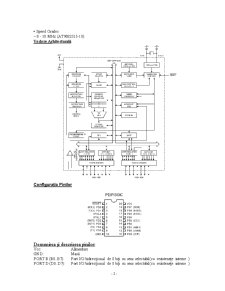
- Speed Grades
– 0 - 10 MHz (AT90S2313-10)
Vedere Arhitecturală
Configuraţia Pinilor
Denumirea şi descrierea pinilor:
Vcc: Alimentare
GND: Masă
PORT B (B0 B7): Port I/O bidirecţional de 8 biţi cu sens selectabil(cu rezisteneţe interne )
PORT D (D0 D7): Port I/O bidirecţional de 8 biţi cu sens selectabil(cu rezisteneţe interne )
RESET: Intrare de reset. Pentru a genera reset pulsul de intrare trebuie să rămăna 0 cel puţin pentru 50ns.
XTAL 1: Intrare de tact (în cazul unui oscilator extern)
XTAL 2: Ieşire de tact – semnal inversat (de la oscilatorul intern).
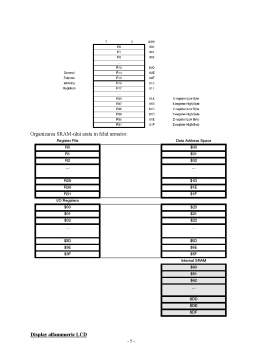
Porturi I/O:
AT90S2313 are doua porturi I/O de 8 biţi cu direcţie selectabilă separat pentru fiecare pin. Modificarea direcţiei I/O sau al stării logice se face în modul “citeşte-modifică-scrie”, asta înseamnă că la modificarea direcţiei sau al stării unui pin se citeşte buferul, se modifică locaţia (bitul) respectiv şi se scrie înapoi. Pinii porturilor I/O pot avea funcţii alternative, care pot fi activate din registrele de control al diferitelor elemente periferice.
Un port I/O are 3 regitre: de date, de direcţie şi de intrare.
Biţii registrului de date sunt interpretate ca nivele de tensiune pe pinii portului care sunt setate ca ieşire, şi ca activarea rezistenţelor pull-up interior al pinului respectiv, dacă acesta este setat ca intrare Registrul de date este accesibil pentru scriere şi citire.
Registrul de direcţie selectează direcţia I/O pentru fiecare pin. Dacă bitul este 1 în acest registru înseamnă că pinul respectiv este ieşire iar bitul 0 înseamnă ca bitul respectiv este intrare. Registrul de direcţie este accesibil pentru scriere şi citire.
Valoarea pinilor de intrare poate fi citit doar prin registrul de intrare. Dacă se citeşte registrul de date, primim doar configuraţia pull-up-urilor.
Preview document














Conținut arhivă zip
- Proiect MIP - Afiseaza Numarul de Km Parcursi.doc