Extras din proiect
I. STADIUL ACTUAL PRIVIND MINI ROBOŢII MOBILI
1.1. Roboţi mobili
Roboţii sunt maşini electromecanice automate. Unii dintre roboţi nu sunt complet automaţi dar sunt controlaţi de oameni prin telecomandă, utilizând camere video sau alte sisteme de control. Majoritatea roboţilor sunt utilizaţi în procesele de fabricaţie. Alţii pot fi utilizaţi ca manipulatoare pe adâncul mării, telecomandate. O altă categorie de roboţi pot fi utilizaţi în diverse laboratoare unde se lucrează cu substanţe radioactive sau există temperaturi ridicate sau alte locuri periculoase. Unii roboţi sunt mobili, având sistem de locomoţie încorporat, putându-se deplasa pe uscat, pe apă, în aer. Modalităţile de propulsare sunt dintre cele mai diverse, cum ar fi:
pe roţi;
cu apă;
cu jet de apă sau aer, etc.
Bombele ghidate şi avioanele fără pilot (telecomandă) pot fi înglobate în categoria roboţi mobili.
Controlul automat variază, din punct de vedere al complexităţii, de la simple relee până la metode computerizate foarte sofisticate.
Roboţii mobili, în majoritatea situaţiilor, sunt dotaţi cu camere video sau alţi senzori de percepere a mediului în care activează. Controlul uman se realizează prin folosirea unor simple butoane până la joisticuri complicate cu putere de răspuns.
Sistemele de comandă includ module de comunicare bazate pe unde radio, sonare (acustice), echolocalizare (ghidare prin ecran), fibre optice sau cabluri.
Mulţi roboţi sunt construiţi prin înlănţuirea unor componente care imită segmentele braţului uman.
Toate metodele sunt limitate de imposibilitatea de potrivire perfectă cu capacitatea de manevrabilitate a mâinii umane sub controlul ochiului şi creierului uman.
Ingineria roboţilor a fost foarte mult influenţată de ficţiune, în sensul că are doza ei de utopie.
Totuşi, foarte mulţi bani sunt în continuare cheltuiţi pentru cercetarea în domeniul obţinerii de fiinţe artificiale prin duplicarea mâinilor şi propulsiei prin mers păşitor biped.
Roboţii mobili
Universul în care îşi desfăşura activitatea robotul fixat la sol, poate fi extins prin crearea capacităţii de mobilitate a bazei robotului, funcţie de reperul fix la sol. De altfel, se ştie că executarea unei lucrări atrage după sine necesitatea de a cunoaşte poziţia robotului faţă de elementele fizice manipulate implicate în această lucrare. De asemenea, unul din punctele fundamentale ale robotului pe vehicul constă în a cunoaşte unde se află el în mijlocul universului pe care îl poate parcurge.
Soluţia acestei probleme nu a fost imediată, cercetătorii focalizându-şi atenţia asupra vehiculului astfel încât se înţelege adesea prin robot mobil o platformă care se doreşte a fi în totalitate automată (capabilă prin ea însăşi de a se deplasa, de a se plasa şi de a şti ce drum trebuie să urmeze în funcţie de ce obiectiv i s-a indicat) uitând momentan unealta de lucru a fi montată pe platformă, adică robotul fixat.
Termenii sinonimi robotului mobil sunt:
robot mobil autonom;
robot automotor.
Structura unui robot mobil
Singurele lucruri vizate au fost cercetarea şi executarea de traiectorii pentru vehicul, având obiceiul de a caracteriza robotul mobil prin trei funcţii care sunt:
funcţia de locomoţie;
funcţia de percepţie-decizie;
funcţia de localizare.
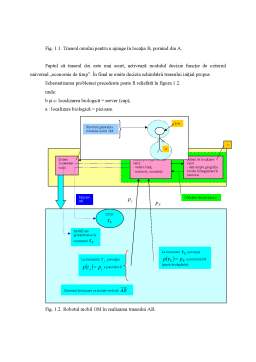
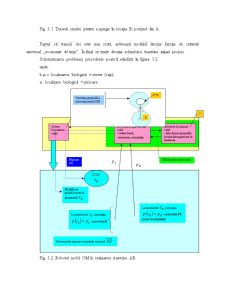
Pentru a evidenţia cele trei funcţii ale unui robot mobil, se recurge la următoarea analogie: Un om trebuie să plece dintr-un loc anume şi să ajungă într-un alt loc anume, într-un timp cât mai scurt. Fiind într-un oraş civilizat, fiecare stradă este etichetată, precum şi fiecare casă. Astfel, funcţie de cunoştinţele de geografie locală, persoana în cauză recunoaşte una după alta fiecare stradă în parte, certitudinea fiind dată de denumirile străzilor. În figura 1.1 este reliefat traseul ce trebuie parcurs.
Preview document





















































Conținut arhivă zip
- Proiectarea unui Robot Autonom cu Roti Actionate cu Motoare de Curent Continuu.doc
Alții au mai descărcat și

CAPITOLUL I INTRODUCERE 1.1. Ce este un robot? Cuvântul robot provine din limba cehă (robota) şi înseamnă muncitor sau rob. O definiţie simplă a...

Capitolul 1. Introducere Scopul acestui proiect este de a face un robot capabil să navigheze în jurul obstacolelor într-o încăpere folosind...

Capitolul 1. Introducere Să se implementeze un sistem inteligent pentru un robot mobil destinat explorării de medii necunoscute. Cerințe : -...


Capitolul 1 INTRODUCERE ÎN PROBLEMATICA SISTEMELOR DE CONDUCERE Robotul industrial reprezinta în momentul de fata punctul de intersectie al...

3. Functionarea În general, pentru realizarea stabilizatoarelor de tensiune se folosesc proprietatile diodelor. Cel mai simplu tip de...
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...