Cuprins
- CAPITOLUL I - INTRODUCERE
- 1.1. Ce este un robot- 1
- 1.2. Concepte ale existenţei roboţilor 1
- 1.3. Asemănări cu omul 2
- 1.4. Interacţiunea cu mediul înconjurător 2
- 1.5. Tipuri de roboţi 4
- 1.6. Scopul lucrării 4
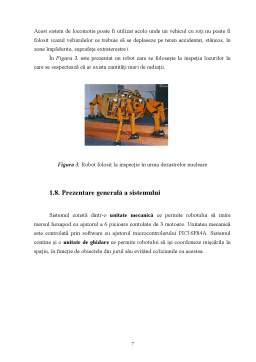
- 1.7. Prezentare generală a sistemului 5
- CAPITOLUL II – IMPLEMENTAREA UNITĂŢII MECANICE
- 2.1. Prezentare generală a unităţii mecanice 6
- 2.2. Funcţionarea mecanică 7
- 2.3. Prezentarea paşilor 7
- 2.3.1. Deplasarea în faţă 7
- 2.3.2. Deplasarea în spate 8
- 2.3.3. Întoarcerea spre dreapta 10
- 2.3.4. Întoarcerea spre stânga 11
- CAPITOLUL III – IMPLEMENTAREA HARDWARE
- 3.1. Prezentare generală a unităţii hardware 13
- 3.2. Circuitul de alimentare 15
- 3.3. Unitatea de ghidare 15
- CAPITOLUL IV – MICROCONTROLERUL
- 4.1. Informaţii generale despre microcontrolere 20
- 4.2. Microcontrolerul PIC16F84A 21
- CAPITOLUL V – IMPLEMENTARE SOFTWARE
- 5.1. Limbajul folosit 34
- 5.2. Prezentarea şi explicarea codului 35
- 5.2.1. Codul pentru unitatea de ghidare cu sensor IR 36
- 5.2.2. Codul pentru ghidarea robotului cu ajutorul a două antene 45
- Concluzii 50
- Bibliografie 51
Extras din proiect
CAPITOLUL I
INTRODUCERE
1.1. Ce este un robot?
Cuvântul robot provine din limba cehă (robota) şi înseamnă muncitor sau rob. O definiţie simplă a robotului şi larg acceptată la ora actuală este următoarea: un robot este un sistem inteligent care interacţionează cu mediul fizic înconjurător, prin intermediul unor senzori şi a unor efectori.
Prin prisma definiţiei de mai sus, s-ar putea spune că şi omul este un robot. Şi omul “interacţionează” cu lumea înconjurătoare prin intermediul unor senzori şi a unor efectori, reprezentate în lumea biologică de terminaţii nervoase, respectiv muşchii. Bineînţeles, diferenţa cea mai semnificativă între robot şi om, este că robotul a fost creat de om, şi nu invers.
1.2. Concepte ale existenţei roboţilor
Autorul de literatură Science Fiction, Isaac Asimov, a propus trei “legi ale roboticii”, sau mai bine zis ale existenţei unui robot [1]. Mai târziu acesta a adăugat încă o lege, numită legea zero. Cu toate că aceste legi au fost privite la început ca fiind o pură ficţiune, ele au fost preluate mai târziu, atât de alţi scriitori Science Fiction, cât şi de oameni de ştiinţă, ca şi principii de bază pentru existenţa unui robot. Astfel, Isaac Asimov este recunoscut de unii ca fiind printre oamenii care au pus bazele (fie ele pur abstracte) ale ştiinţei pe care astăzi o numim robotică.
Legile existenţei unui robot sunt :
- Legea 0 : Un robot nu are voie să provoace vreun rău umanităţii, sau prin inactivitate, să permită vreun rău umanităţii.
- Legea 1 : Un robot nu are voie să rănească o persoană umană, sau prin inactivitatea sa, să permită rănirea unei persoane umane, cu excepţia cazului când această lege contravine cu altă lege anterioară.
- Legea 2 : Un robot trebuie să respecte toate ordinele date de o persoană umană, cu excepţia cazurilor în care se intră în conflict cu vreo lege anterioară.
- Legea 3 : Un robot trebuie să-şi protejeze propria existenţă atât timp cât acestă activitate nu intră în conflict cu legile anterioare.
1.3. Asemănări cu omul
Aşa cum corpul uman are nevoie de anumite organe pentru a putea interacţiona cu mediul înconjurător, precum şi pentru a susţine organismul în viaţă, aşa şi orice model de robot generalizat ar trebui să conţină cât mai multe elemente de natură mecanică sau electrică, care să execute cât mai multe funcţii. O prezentare sumară a unor asemănări între “caracteristicile” unei personae umane şi ale unui model de robot, este redată în tabelul următor.
Om
Robot
Creier Microprocesor, microcontroler
Ochi Camere video, senzori de lumină
Urechi Senzori pentru sunet
Gură Receptoare şi transmiţătoare pentru date (imagini video, sunet)
Schelet Structură mecanică
Echilibru Senzori pentru orientare
Muşchi Motoare
Mâncare Sursă de curent (baterii)
Membre Roţi, picioare
Tabel 1. Asemănări între om şi robot
1.4. Interacţiunea cu mediul înconjurător
Modul de interacţiune clasic al unui robot constă din trei paşi [2]:
1. – robotul “simte” mediul înconjurător, adică primeşte informaţii despre mediu prin senzorii lui;
2. – robotul planifică ce să facă în continuare, construind un model al lumii înconjurătoare, bineînţeles luând în calcul atât obiectivele pe termen scurt (detectarea unui obstacol), cât şi cele pe termen lung (deplasarea până într-un anumit punct);
3. – robotul îşi pune în aplicare planul prin intermediul efectorilor.
Figura 1. Modul de interacţiune clasic al unui robot
Acest model a fost predominant în timpul anilor ’80. Odată cu simplitatea oferită de acest model, intervin şi anumite probleme care trebuie luate în calcul. Una din aceste probleme este faptul că rigiditatea acestui model îl face foarte lent. La fiecare iteraţie a acestui algoritm, trebuie realizate toate operaţiile din nou, şi anume: citirea senzorilor, modelarea lumii înconjurătoare, planificarea operaţiilor viitoare, respectiv realizarea acestora.
Preview document

























































Conținut arhivă zip
- Soft pentru Robot Comandat cu Microcontroler PIC.doc
Alții au mai descărcat și

INTRODUCERE Cuvânt înainte Am ales această temă deoarece sunt pasionat de fotbal şi de roboţi şi ca totul să decurgă bine m-am gândit să îmbin...

I. STADIUL ACTUAL PRIVIND MINI ROBOŢII MOBILI 1.1. Roboţi mobili Roboţii sunt maşini electromecanice automate. Unii dintre roboţi nu sunt complet...

Capitolul 1. Introducere Scopul acestui proiect este de a face un robot capabil să navigheze în jurul obstacolelor într-o încăpere folosind...


3. Functionarea În general, pentru realizarea stabilizatoarelor de tensiune se folosesc proprietatile diodelor. Cel mai simplu tip de...