Cuprins
- MEMORIU JUSTIFICATIV.4
- CAPITOLUL I
- NOȚIUNI GENERALE DESPRE ACȚIONĂRI ELECTRICE
- 1.1. Definiție, părți componente.6
- 1.2. Alegerea tipului de motor.6
- 1.3. Condiții impuse pentru acționarea mașinilor de lucru.6
- 1.4. Caracteristicile mecanice ale mașinilor de lucru.7
- 1.5. Regimul staționar al sistemelor de acționare electrică.9
- 1.6. Regimurile dinamice ale sistemelor de acționare electrică.9
- CAPITOLUL II
- ACȚIONĂRI CU GRUPURI DE MAȘINI
- 2.1. Noțiuni introductive.10
- 2.2. Grupul generator – motor.10
- 2.3. Convertizoare de frecvență rotative.12
- 2.4. Arborele electric.12
- CAPITOLUL III
- NORME DE PROTECȚIE ȘI SECURITATE A MUNCII
- ÎN EXPLOATAREA MAȘINILOR ELECTRICE.14
- BIBLIOGRAFIE.17
Extras din proiect
MEMORIU JUSTIFICATIV
Acţionările electrice studiază conversia electromecanică a energiei în scopul realizării unor procese de producţie, în cadrul cărora întotdeauna apare mişcare.
Elementul care realizează conversia este maşina electrică. La început componentele acţionărilor electrice erau considerate mai simplist (maşinile electrice şi transmisiile). Odată cu dezvoltarea teoretică, acţionările electrice se consideră în prezent ca un sistem.
În acest context, componentele sistemului de acţionare electrică (S.A.E.)sunt: maşinile electrice, transmisiile, mecanismul sau mecanismele de lucru,aparatura de măsură, componentele electronice de putere prin care se realizează conducerea funcţionării şi aparatura de protecţie. Partea mecanică se abordează doar în măsura în care pune condiţii pentru funcţionarea părţii electrice.
Acţionările electrice ca sistem se definesc astfel: "Ansamblul elementelor fizice interconectate prin care se realizează conversia electromecanică a energiei, în scopul efectuării unui proces tehnologic de producţie".
O caracteristică a acţionărilor electrice rezultă din interdependenţa componentelor acţionărilor electrice şi din interdependenţa funcţională şi structurală a părţii electrice cu cea mecanică.
Dezvoltarea acţionărilor electrice a dus la acţionarea individuală, la desfiinţarea numeroaselor transmisii exterioare dintr-o secţie industrială.
Partea mecanică pune în prezent condiţii tot mai pretenţioase pentru partea electrică (reglarea şi varierea turaţiei permise). Astfel, partea electrică se dezvoltă pentru a satisface cerinţe, (funcţionarea corelată a maşinii electrice,interdependenţa mai multor maşini electrice, automatizare).
Avantajele acţionărilor electrice:
- transportul simplu al energiei electrice pe distanţe mari şi la puteri foarte mari;
- dispun de o gamă de maşini electrice cu puteri şi turaţii mult diferite;
- maşinile electrice oferă posibilitatea modificării turaţiei, porniri, frânări,reversări, în cele mai bune condiţii, corelarea mişcării maşinilor de lucru ale aceleiaşi instalaţii productive;
-funcţionare economică şi recuperarea energiei;
- oferă posibilităţile cele mai bune de automatizare;
- oferă posibilităţile dispunerii utilajelor în fluxul tehnologic.
Structura sistemelor de acţionare electrică (S.A.E.)
Pentru a studia structura sistemelor de acţionare electrică vom face uz de două criterii:
1. După criteriul numărului de maşini electrice de acţionare (MEA) faţă de numărul mecanismelor de lucru (ML) avem:
a) Acţionare pe grupe - mai multe ML sunt acţionate de la o singură MEA;
b) Acţionare individuală - fiecare ML are o MEA;
c) Acţionare multiplă - un ML este acţionat de mai multe MEA.
2. După criteriul funcţional (după modul cum se face conducerea proceselor tehnice), avem următoarele situaţii:
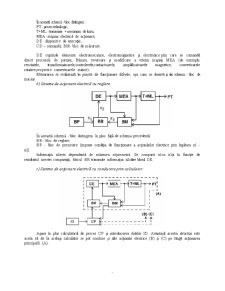
a)Sisteme de acţionare electricã cu comandã:
În această schemă - bloc distingem :
PT - proces tehnologic;
T+ML - transmisie + mecanism de lucru;
MEA - maşina electrică de acţionare;
DE - dispozitiv de execuţie;
CD – comandă; BM- bloc de măsurare.
DE cuprinde elemente electromecanice, electromagnetice şi electronice prin care se comandă direct procesele de pornire, frânare, reversare şi modificare a vitezei maşinii MEA (de exemplu: reostatele, transformatoarele,controlerele,contactoarele, amplificatoarele magnetice, convertoarele rotative,respectiv convertoarele statice).
Măsurarea se realizeazã în puncte de funcţionare diferite, aşa cum se observă şi din schema - bloc de mai sus.
b) Sisteme de acţionare electricã cu reglare :
În această schemă - bloc distingem în plus faţã de schema precedentã:
BR - bloc de reglare;
BP - bloc de prescriere (impune condiţia de funcţionare a acţionărilor electrice prin legătura x1 -x2).
Informaţia x2este dependentă de mărimea x1prescrisă. Se compară x1cu x3şi în funcţie de rezultatul acestei comparaţii, blocul BR transmite informaţia x2către blocul DE.
c) Sisteme de acţionare electricã cu conducere prin calculator:
Apare în plus calculatorul de proces CP şi introducerea datelor ID. Avantajul acestei structuri este acela cã de la acelaşi calculator se pot conduce şi alte acţionări electrice (B) şi (C) pe lângã acţionarea principalã (A).
Bibliografie
Sabina Hilohi, Doinita Ghinea, Nastase Bichir - Elemente de comanda control pentru actionari si sisteme de reglare automata - manual pentru clasele a XI - a si a XII - a, specializarea electrotehnica, Editura Didactica si Pedagogica, Bucuresti, 2002;
Sandra Cănescu, Traian Cănescu, Ștefan Prisiceanu – ”Manualul electricianului de întreținere și reparații”, editura Didactică și Pedagogică, București, 1972;
Nicolae V. Boțan, Corneliu Boțan, Năstase Bichir, Constanțiu Popescu – ”Mașini electrice și acționări”, editura Didactică și Pedagogică, București, 1985;
Năstase Bichir, Dan Mihoc, Corneliu Boțan, Sabina Hilohi – ”Mașini aparate acționări și automatizări”, editura Didactică și Pedagogică, București, 1998;
I. Stana, N. Nițu – ”Întreținerea și repararea mașinilor electrice pentru acționarea mecanismelor și a utilajelor industriale”, editura Tehnică, București, 1985.
Preview document













Conținut arhivă zip
- Actionari cu Grupuri de Masini.docx
Alții au mai descărcat și

- Un = tensiunea de alimentare a sarcinii. - In = curentul nominal prin sarcina. - DC = durata de conectare. - fc = frecventa de conectare. - N...

1.Introducere Magneţii permanenţi (MP) sau materialele magnetice dure sunt caracterizate printr-o rezistenţă mare la demagnetizare, odată ce...

Motoarele sincrone pas cu pas sunt destinate transformării impulsurilor de curent, în deplasări unghiulare sau liniare discrete, numite paşi....

Elemente Arcuitoare Generalitati: Folosirea elementelor arcuitoare în constructia produselor electrotehnice este legata de principiul de...

Proiect A.S.D.N. Tema: Realizarea unui automat de sortat mere dupa diametru (diametre între 5,5 si 6 cm si între 7,5 si 8 cm) precum si dupa...

ARGUMENT Iluminat normal se refera la instalatiile utilizate zilnic,in conditii normale. Iluminatul de siguranta trebuie sa asigure evacuarea...

1. Domeniu de aplicare Norma se refera la verificarea/etalonarea voltmetrelor indicatoare si inregistratoare,destinate masurarilor de tensiuni...
Te-ar putea interesa și

CAP.1 PREZENTAREA GENERALA Numele: S.C.Muntenia S.A. Filipestii de Padure Sediul firmei: str.Principala, nr. 941-Filipestii de Padure, judetul...

I.Generalitati Prin masina electrica, de regula rotativa, întelegem acea masina care converteste puterea electrica în putere mecanica sau...

Introducere in Stud Bar Barul este o unitate de alimentatie, cu program de zi sau de noapte, in care se serveste preponderent un sortiment...

Întreprinderea supusa diagnosticului îsi desfasoara activitatea în cadrul ramurii „Productia de motoare, generatoare si transformatoare...

1. Caracterizarea generală a societăţii S.C. Motoare Electrice S.A. este o societate comercială pe acţiuni cu capital integral privat,...

Figura nr. 1 Poziţionarea culturii organizaţionale faţă de caracteristicile celor şase dimensiuni Geert Hofstede (1996) ,este unul dintre cei mai...

CAP. 1. EFICIENŢA ECONOMICĂ A INVESTIŢIILOR 1.1. Conţinutul categoriei eficienţa economică a investiţiilor 1.1.1. Coordonatele abordării...

1. 1 Fundamentarea strategiei de internationalizare În stabilirea strategiei internationale, firma trebuie sa tina cont nu numai de elementele...