Extras din proiect
Robotul RB 4 EV are menirea de a fi folosit numai in scopuri educationale sau ca hobby. Nu are precizia si robustetea necesara unui robot industrial. Are 6 axe, fiecare dintre ele fiind actionata de un motor pas cu pas. Robotul are 5 grade de libertate; rotatia corpului, a umarului, a cotului si a incheieturii. Al 5-lea grad de libertate il reprezinta indoirea incheieturii. Robotul este controlat prin manipularea individuala a unghiurilor articulatiilor. In termeni mai tehnici, acestea se refera la miscarea in spatiu pe care o pot efectua aceste articulatii. Nu exista un feedback intre robot si calculatorul care-l controleaza. “Limitarile soft” sunt calculate si mentinute de sistemul de control astfel incat sa protejeze robotul. Acest lucru este departe de ideal si prezinta o multime de probleme. De exemplu, daca alimentarea spre robot este intrerupta, in momentul in care sistemul este repornit, nu putem stii pozitia curenta a robotului.
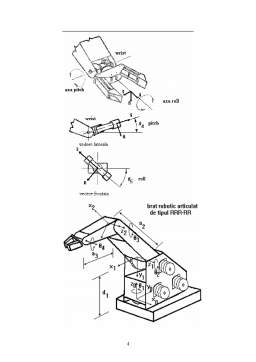
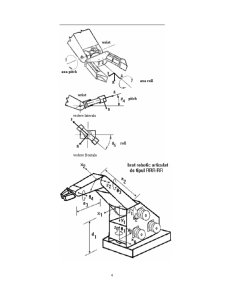
Figura 1
(d1 = 214mm, a2 = 200mm, a3 = 150mm, d5 = 85mm)
MISCARE LIMITA
Rotirea corpului 240 grade
Rotirea umarului 150 grade (75 inainte, 75 inapoi)
Rotirea cotului 120 grade (75 inainte, 75 inapoi)
Indoirea incheieturii 180 grade
Rotirea incheieturii 360 grade
Cele 6 axe sunt controlate simultan. Aceasta inseamna ca daca o operatiune complexa este programata, toate cele 6 axe se vor misca intr-o maniera coordonata, astfel ca toate cele 6 axe vor ajunge la destinatia lor finala simultan. Aceasta inseamna o miscare coordonata.
Din Figura 1:
(1) Desenati o schita a robotului in pozitia ZERO si identificati si construiti axele corespunzatoare
(2) Construiti tabela cu parametrii Denavit-Hartenberg
(3) Determinati matricile T individuale
(4) Obtineti ecuatia cinematica directa pentru RM-101
(5) Dezvoltati un algoritm simbolic fara erori pentru cinematica inversa folosind limitarile impuse de articulatiile de mai sus
Pentru punctele (4) si (5), scrieti doua programe folosind MATLAB-ul care sa rezolve problema. De exemplu, daca introduceti valorile incheieturilor, cinematica directa sa furnizeze ca rezultat elementele . Determinati daca rezultatul este corect.
Apoi luand rezultatul ca date initiale, solutia inversa ar trebui sa aiba ca rezultat unghiurile de start initiale. Aceasta procedura va demonstra ca algoritmul dumneavoastra functioneaza corect. Pentru problema de cinematica inversa solutia ar trebui sa intercepteze si sa identifice corect cauza atunci cand avem date initiale eronate.
(6) Comparati rezultatele obtinute prin programul scris in MATLAB cu functiile ikine si fkine din Toolbox-ul Robotics. Care dintre ele necesita mai putine calcule? (Indicatie: puteti determina acest lucru cu ajutorul functiei MATLAB flops).
Dimensiuni pentru robotul RB 4 EV:
• Inaltimea articulatiei umarului deasupra mesei = 214mm
• Lungimea bratului superior = 200mm
• Lungimea bratului inferior = 150mm
• Distanta dintre incheietura si centrul “palmii” = 85mm
Preview document
































Conținut arhivă zip
- Cinematica Robotului RB 4 EV.doc
Alții au mai descărcat și

Introducere Circumstanţele în care ne găsim astăzi în domeniul microcontrolerelor şi-au avut începuturile în dezvoltarea tehnologiei circuitelor...

Elemente Arcuitoare Generalitati: Folosirea elementelor arcuitoare în constructia produselor electrotehnice este legata de principiul de...

Proiect A.S.D.N. Tema: Realizarea unui automat de sortat mere dupa diametru (diametre între 5,5 si 6 cm si între 7,5 si 8 cm) precum si dupa...

ARGUMENT Iluminat normal se refera la instalatiile utilizate zilnic,in conditii normale. Iluminatul de siguranta trebuie sa asigure evacuarea...

1. Domeniu de aplicare Norma se refera la verificarea/etalonarea voltmetrelor indicatoare si inregistratoare,destinate masurarilor de tensiuni...