Cuprins
- 1.Descrierea sistemului cuadripol electric 3
- 2.Determinarea modelelului matematic primar al sistemului 3
- 3.Determinare MM-II si MM-ISI si a functiei de transfer pe cale analitica 4
- 4.Reprezentarea MM in MATLAB(functie de transfer,poli,zerouri,conversia continuu-discret) 5
- 5.Simularea functionarii sistemului 6
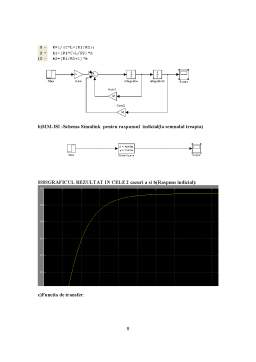
- 6.Simularea si validarea modelelor echivalente folosind mediul Simulink 8
- 7.Bibliografie 10
Extras din proiect
1.Descrierea sistemului cuadripol electric:
Fie sistemul constituit din urmatorul circuit electric privit ca sistem cu orientarea de la
u1->u2. La momentul iniţial condensatorul este încărcat cu tensiunea uc0 iar curentul prin
circuit este i(0)=0.
Circuitul din figura este un sistem de tip SISO(o singura intrare si o singura iesire) si
va fi modelat in cadrul lucrarii ca un sistem fizic in timp continuu (STC).
Sistem cu orientarea u1→u2 u=u1 y=u2
Notam ic curentul prin condensator si uc tensiunea condensatorului iar iL si uL
curentul si tensiunea prin bobina.
Valori numerice: L=3H; C= 0.15μF; R2=2 kΩ ;R1=1kΩ.
2.Determinarea modelului matematic primar al sistemului:
Modelul matematic primar cuprinde ecuaţiile circuitului electric care exprima bilanţul dintre tensiunea de intrare şi căderile de tensiune din circuit, respectiv tensiunea de ieşire în funcţie de căderile de tensiune din circuit:
uc(t)= uL(t)+u2(t) (1)
u1(t)=R1*i1(t)+ uc(t) (2)
i1(t)=ic(t)+iL(t) (3)
uL(t)=R2*iL(t) (4)
uL(t)=L*(diL/dt) (5)
uc(t)=(1/C)* ∫0t ic(t)dt +uc0 (6)
3.Determinare MM-II si MM-ISI si a functiei de transfer pe cale analitica:
A)MM-II
Din ultima ecuatie (6) rezulta prin derivare: ic(t)=C* (duc/dt)
Prin inlocuire in ecuatia (3) va rezulta
i1(t)=u2(t)/R2 +L*C*((d2U2/dt)/R2) +C*(dU2/dt)
Prin inlocuire in ecuatia (1) rezulta:
u1(t)=R1*u2(t)/R2+R1*L*C*((d2U2/dt)/R2)+C*(dU2/dt)+L*(dU2/dt)+u2(t)
Deoarece u=u1 si y=u2 rezulta MM-II al sistemului:
y’’(t) *((R1/R2 )*C*L) + y’(t)*(R1*C+ L/R2) +y(t)*(R1/R2+1)=u(t)
B)MM-ISI
(7) x=[iL uc]T => x’=[iL’ uc’]T
(8) y=u2=[R2 0]*[iL uc ]T+[0]*u1 =>C=[R2 0] si D=[0]
Pentru a determina A si B ne vom folosi de relatiile (1)(7).
Din (6)=> uc’(t)=(1/C)*ic(t)
ic(t)=i1(t)-iL(t) iar i1(t)=(u1-uc)/R1
Rezulta asadar: uc’(t)=(1/C) *(u1-uc)/R1-iL/C
iL’= uL/L=(uc-u2)/L=uc/L –(R2*iL)/L
Deci
A=[-R2/L 1/L ; -1/C -1/C*R1]
B=[0 ; 1/(C*R1)]
C=[R2 0]
D=[0]
C)FUNCTIA DE TRANSFER:
In domeniul timp am obtinut ecuatia:
y’’(t) *((R1/R2 )*C*L) + y’(t)*(R1*C+ L/R2) +y(t)*(R1/R2+1)=u(t)
In domeniul operational prin aplicarea transformatei Laplace=>
S^2 *y(s) *((R1/R2 )*C*L) + s*y(s)*(R1*C+ L/R2) +y(s)*(R1/R2+1)=u(s),<=>
<=>y(s)=u(s) / ( (S^2 *((R1/R2 )*C*L) + s*(R1*C+ L/R2) +(R1/R2+1) )
Preview document










Conținut arhivă zip
- Modelarea si Simularea unui Cuadripol Electric.doc
Alții au mai descărcat și

I. Metode de calcul ale câmpului magnetic Una dintre cele mai simple şi eficiente metode de determinare a câmpului magnetic într-o instalaţie...

Generalitãti Transformatorul electric este un aparat de curent alternativ a cãrui functionare se bazeazã pe legea inductiei electromagnetice,...

I. SCOPUL LUCRARII Determinarea traficului (throughput) pe o retea Ethernet partajata pentru diverse incercari (trafic scazut si ridicat). II....

Echipamentele de comutaţie reprezintă o clasă importantă a echipamentelor electrice, având în principal rolul de a stabili şi întrerupe conducţia...

Introducere Economia este un mecanism real dinamic aflat în continuă mişcare. Ea are în componenţă unsistem de sectoare, ramuri şi activităţi de...

CAP.1 GENERALITĂŢI 1.1. Aspecte fiziologice ale relaţiei lumină-vedere Vederea, dintre toate simţurile cu ajutorul cărora omul percepe realitatea...

Schema bloc a unui sistem de acţionare electric este cea din figura 10.1. Figura 10.1. Schema structurală a unui sistem de acţionare electric...

1.1 Mărimi electrice a. Sarcina electrică. Fenomenele fizice le percepem prin acţiuni ce pot fi forţe sau cupluri. Când aceste fenomene nu le...