Cuprins
- 1. Servomecanisme pag.3
- 1.1 Schema de principiu pag.3
- 1.2 Schiţa cinematica a servomecanismului pag.4
- 2. Generatorul de Semnale PWM pag.4
- 3. Mase plastice pag.7
- 3.1 Polietilena pag.8
- 3.2 Polipropilena pag.8
- 3.3 Clorura de Polivinil pag.8
- 3.4 Polistirenul pag.9
- 3.5 Utilizarile Maselor Plastice pag.9
- 4. Lagare de alunecare. Rulmenti pag.10
- 4.1 Caracteristici. Parti componente. Materiale pag.10
- 4.2 Clasificare pag.11
- 5. Traductoare de pozitie pag.12
- 6. Circuite Integrate pag.13
- 7. Calculul şi proiectarea servomecanismului pag.16
- Calculul modulelor roţilor dinţate pag.17
- Calculul rapoartelor de transmisie pag.17
- Calculul diametrului cercului de divizare pag.17
- Calculul înălţimi capului dintelui pag.18
- Calculul înălţimii piciorului dintelui pag.18
- Calculul diametrului cercului de fund pag.18
- Calculul diametrului cercului de vârf pag.18
- Determinarea turaţiilor celor cinci arborii pag.19
- Determinarea puterilor şi al momentelor de torsiune pag.19
- 7.10 Calculul Puterilor pag.19
- 7.11 Calculul momentelor pag.19
- 7.12 Determinarea componentelor forţei de angrenare pag.19
- 7.13 Determinarea dimensiunilor arborilor pag.20
Extras din proiect
Tema de proiect
Să se proiecteze un srervomecanism cu urmatoarele caracteristici :
- roţi dintate cilindrice ;
- patru trepte de reducere a turatiei ;
- cuplul arborelui de iesire 11 kgcm ;
- tensiunea de alimentare 4,8 V ;
- unghiul mamaxim de rotatie al arborelui 1200 ;
- arborele fluctuează 900 în 0,15 secunde , adică o rotaţie pe minut ;
- comanda PWM ;
- motor tip MG 995
1. Servomecanisme
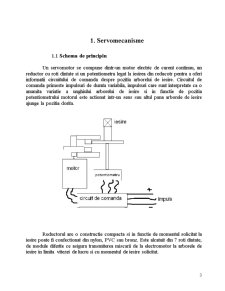
1.1 Schema de principiu
Un servomotor se compune dintr-un motor electric de curent continuu, un reductor cu roti dintate si un potentiometru legat la iesirea din reducotr pentru a oferi informatii circuitului de comanda despre pozitia arborelui de iesire. Circuitul de comanda primeste impulsuri de durata variabila, impulsuri care sunt interpretate ca o anumita variatie a unghiului arborelui de iesire si in functie de pozitia potentiometrului motorul este actionat intr-un sens sau altul pana arborele de iesire ajunge la pozitia dorita.
Reductorul are o constructie compacta si in functie de momentul solicitat la iesire poate fi confectionat din nylon, PVC sau bronz. Este alcatuit din 7 roti dintate, de module diferite ce asigura transmiterea miscarii de la electromotor la arborele de iesire in limita vitezei de lucru si cu momentul de iesire solicitat.
2. Generatorul de Semnale PWM
Primele proiecte de SMPS (Switch-Mode Power Supply) utilizau o abordare standard cu privire la operarea în mod tensiune. Una dintre intrările unui comparator de tensiune era comandată de un generator de tip rampă, iar cealaltă intrare era comandată de semnalul de eroare al amplificatorului de eroare / filtrului de reacţie (Figura 1). Rezultatul era un puls PWM (Pulse-Width Modulation) bazat numai pe semnalul de eroare.
În timp ce acesta funcţiona, el cauza uneori o creştere a câmpului magnetic al inductorului, dacă curentul prin inductor nu se descărcase complet pe durata perioadei “off” a semnalului PWM. Rezultatul natural al acestui efect era saturarea miezului inductorului, o creştere semnificativă a curentului prin inductor şi, uzual, defectarea bruscă a tranzistorului de comutaţie.
Odată cu maturizarea proiectelor de SMPS, acestea s-au mutat către sisteme mai sigure, cunoscute ca sisteme de mod curent. Acest tip de sistem înlocuieşte generatorul de tip rampă cu un semnal de reacţie de curent comandat de curentul prin inductor. Rezultatul este un sistem în care curentul de vârf prin inductor este controlat direct de semnalul de eroare, ceea ce elimină creşterile câmpului magnetic al inductorului şi salvează tranzistoarele de comutaţie. Această schimbare către modul curent aduce şi alt avantaj: utilizarea tensiunii de eroare pentru a controla curentul maxim prin inductor transformă inductorul într-o sursă de curent controlată în tensiune. Ca şi sursă de curent, inductorul nu mai generează un pol în răspunsul în frecvenţă al buclei de reacţie. Acest lucru modifică reacţia din instabilă necondiţionat în stabilă condiţionat, ceea ce face ca proiectarea filtrului de reacţie să fie mult mai simplă.
De exemplu, să considerăm un sistem de 500 kHz cu rezoluţia PWM de 8 biţi. Prin utilizarea unei configurări de mod tensiune, rezoluţia semnalului PWM limitează controlul asupra factorului de umplere la aproximativ 0,4% (100%/256). Suplimentar, reacţia de tensiune va trebui să fie eşantionată odată pe puls, 500000 de eşantioane pe secundă, pentru a oferi intrarea necesară pentru filtrul de reacţie intern bazat pe software.
Prin aproximare aceasta înseamnă un procesor cu un minim de 1 - 2 BIPS (Billion Instructions Per Second). Cu un factor de umplere de 50%, aceasta înseamnă că jumătate din puterea de procesare este ocupată numai cu limitarea de curent ciclu cu ciclu, ceea ce nu este o abordare prea economică a problemei!
Alternativa există în utilizarea unui microcontroler sau a unui DSP (Digital Signal Controller) cu un periferic PWM on-board, care lucrează în acelaşi fel ca un generator PWM de mod curent (Figura 3). Diagrama bloc din Figura 3 prezintă două componente de semnal mixt, un comparator de tensiune şi un convertor digital/analog (DAC), adăugate unui periferic PWM normal. Comparatorul de tensiune furnizează un semnal de oprire pentru modulul PWM, care este controlat împreună cu ieşirea numărătorului factorului de umplere. Când acesta din urmă atinge valoarea zero, ieşirea comparatorului comandă trecerea în zero a semnalului PWM.
DAC primeşte intrarea sa de la microcontroler şi generează un semnal de referinţă către comparator. Când sistemul este construit într-un SMPS digital, numărătoarele din modulul PWM pornesc pulsul PWM, DAC generează o tensiune la intrarea inversoare a comparatorului, reprezentând curentul dorit în inductor, iar reacţia de curent este trimisă către intrarea ne-inversoare a comparatorului. Odată cu creşterea curentului în inductor, numărătorul factorului de umplere continuă să numere descrescător.
Preview document















Conținut arhivă zip
- Proiect ECMF - Servomecanisme.doc
Alții au mai descărcat și

Capitol I CARACTERISTICILE MATERIALELOR FEROMAGNETICE 1.1. CONSIDERAŢII GENERALE Aceste materiale se caracterizează prin permeabilitatea mult...


1 Aparatele de conectare la retea a masinilor electrice Conectarea la retea si deconectarea de la retea a statorului motoarelor electrice...

Sa se proiecteze instalatia electrica si de forta a unei microintreprinderi la alegerea studentului. Am ales sa proiectez instalatia electrica si...

Elemente Arcuitoare Generalitati: Folosirea elementelor arcuitoare în constructia produselor electrotehnice este legata de principiul de...

Argumentare Lucrarea de fata se vrea a fi un ghid pentru cei ce doresc sa studieze stabilizatoarele de tensiune. In literatura tehnica sunt...

Proiect A.S.D.N. Tema: Realizarea unui automat de sortat mere dupa diametru (diametre între 5,5 si 6 cm si între 7,5 si 8 cm) precum si dupa...

ARGUMENT Iluminat normal se refera la instalatiile utilizate zilnic,in conditii normale. Iluminatul de siguranta trebuie sa asigure evacuarea...