Cuprins
- 1. Date de proiectare
- 2. Cerinte de proiectare
- 3. Etape de proiectare
- 4. Schema de principiu sistemului de urmarire
- 4.1 Studiul si identificarea sistemului global
- 4.2 Stabilitatea sistemului
- 4.3 Analiza sistemului
Extras din proiect
1. Date de proiectare
I Tipul servomecanismului de c.c.: E 701A
Din catalogul firmei producatoare a motorului se iau urmatoarele date:
a) constanta cuplului km = 10.43 [oz×in / A] = 0.07345 [N×m];
b) constanta t.e.m. ke = 7.71 [V / krpm] = 0.07366 [V×s / rad];
c) rezistenta indusului Ra = 0.13 + 0.4 = 0.43 [W];
d) inductivitatea indusului La = 1.13 [mH];
e) curentul maxim admis Ia max = 72 [A];
f ) cuplul nominal MN = 150 [oz×in] = 01.0563 [N×m];
g) momentul de inertie rotoric Jm= 0.1 [oz×in×s2] =7.0422×10-4 [N×m×s2];
h) factorul de amortizare (coeficientul de frecare vâscoasa) Bm = 5 [oz×in/krpm] = 3.3641×10-4 [N×m×s / rad];
i ) rezistenta termica Rth = 2.2 [°C / W];
j ) cuplul static de frecari Mo = 15 [oz×in] = 0.1056 [N×m];
k) temperatura maxima a indusului qmax = 155 [°C];
l ) turatia maxima de mers în gol no = 1.9 [krpm] = 198.86 [rad / s];
II Coeficientul de transfer al potentiometrului kT = 0.5;
III Raportul de transmisie al inductorului m = 50;
IV Raportul nominal al sarcinii si al motorului Js/JM = 3;
Raportul coeficientilor de frecare vascoasa Bs/BM = 2;
Datele se transforma conform: 1° 1 [oz×in] = 1/142 [N×m]
2° 1[krpm] = 1000×p/30 [rad/s]
2. Cerinte de proiectare
1. Raspunsul unghiular, la semnal de intrare treapta unitara, sa prezinte o suprareglare mai mica de 10%;
2. Limitarea curentului indusul SMCC, la valoarea maxima admisibila, sa se faca prin ajustarea factorului de amplificare;
3. Amplificatorul final va fi un amplificator de clasa A sau B.
3. Etapele de proiectare
1) Studiul si identificarea sistemului global;
2) Cercetarea si determinarea limitei de stabilitate a sistemului întreg, cu metoda locului radacinilor, considerând factorul de amplificare k = k1×k2, variind între 0 si ¥;
3) Analiza sistemului la treapta de intrare unitara si determinarea factorului de amplificare optima, koptim;
4. Schema de principiu a sistemului de urmarire
cu servomotorul de c.c.
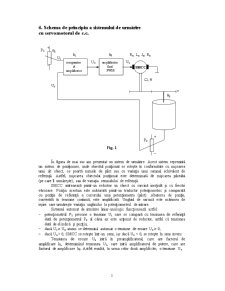
Fig. 1
În figura de mai sus am prezentat un sistem de urmarire. Acest sistem reprezinta un sistem de pozitionare, unde obiectul pozitionat se roteste în conformitate cu miscarea unui alt obiect, ce poarta numele de pilot sau cu variatia unui semnal echivalent de referinta. Astfel, miscarea obiectului pozitionat este determinata de miscarea pilotului (pe care îl urmareste), sau de variatia semnalului de referinta.
SMCC antreneaza printr-un reductor un obiect cu sarcina inertiala si cu frecari vâscoase. Pozitia acestuia este masurata printr-un traductor potentiometric si comparata cu pozitia de referinta a cursorului unui potentiometru (pilot). Abaterea de pozitie, convertita în tensiune continua, este amplificata. Unghiul de sarcina este marimea de iesire care urmareste variatia unghiului la potentiometrul de intrare.
Sistemul automat de urmarire liniar-analogic functioneaza astfel:
- potentiometrul P1 prescrie o tensiune Ui care se compara cu tensiunea de referinta data de potentiometrul P2 al carui ax este actionat de reductor, astfel ca tensiunea data de el indica si pozitia;
Preview document













Conținut arhivă zip
- Servomecanisme - Proiect de Semestru.doc
Alții au mai descărcat și

Memoriu justificativ Toate motoarele electrice au un principiu comun de funcționare, conversia energiei electrice în magnetică și din magnetică în...

Memoriu Justificativ Motoarele sincrone cu magneți permanenți au o aplicabilitate în creştere datorită avantajelor sale, precum randamente...

MEMORIU JUSTIFICATIV Am ales această lucrare deoarece în contextul energetic actual mondial producerea energiei de la surse neconvenţionale...

Memoriu justificativ În ultimii ani se tot încearcă o trecere de la sectorul energetic al lumii deja existent, în general dominat de monopoluri cu...

Introducere Una dintre cele mai importante probleme ale epocii moderne o reprezintă poluarea atmosferică. Acest fenomen, extrem de complex, a...

TEMA DE PROIECT PROIECTAREA UNUI SISTEM DISTRIBUIT DE MASURARE BAZAT PE O RETEA DE TIP LAN PLAN CONEXIUNE STEA PENTRU MÍSURAREA TEMPERATURII ÎN 5...

TEMA DE PROIECTARE Sa se proiecteze instalatia electrica de alimentare cu energie a unui spatiu de productie avnd urmatoarele date initiale:...

Introducere generala : Odata cu cresterea consumului de energie electrica si cresterea cererii de control si imbunatatire a eficacitatii...
Te-ar putea interesa și

CAP.1. TEMA DE PROIECT Sa se calculeze si sa se proiecteze cutia de vieze la autovehiculul HONDA S 2000 cu urmatorii parametrii: Pmax=240 CP...

1.Servodirectia Servodirectia are rolul de a facilita transmiterea miscarii volanului spre rotile masinii. Asigura un confort sporit in conducerea...

PRESA CU PIULITA ROTITOARE 1. Sa se proiecteze o presa cu piulita rotitoare pentru urmatoarele caracteristici: Forta maxima: 16500 N Cursa...