
Extras din proiect
Metode de control
Acționările electrice cu MAS s-au impus în aplicații de două feluri [10] :
- aplicații în care se dorește utilizarea optimă și eficientă a energiei electrice, ceea ce se poate obține prin înlocuirea acționărilor cu viteză constantă din procesele mari consumatoare de energie cu acționări reglabile ale vitezei, folosind mașini de c.a. alimentate cu tensiune și frecvență variabilă;
- aplicații unde există tendința de integrare a elementului de execuție în sistemul de automatizare și necesitatea unei dinamici superioare. În aceste cazuri acționările hidraulice și pneumatice sunt în prezent înlocuite cu acționări electrice, care asigură o viteză și precizie de comandă mai ridicată, un raport putere/greutate superior, precum și o robustețe mai mare.
Cele două clase de aplicații în care acționările electrice de curent alternativ s-au impus necesită strategii de comandă și control diferite..
Metodele de control ale mașinilor electrice de curent alternativ pot fi împărțite în două grupe:
- control scalar,
- control vectorial.
Prin control scalar se înțelege comanda sau reglarea doar a amplitudinii variabilelor, iar mărimile de comandă și de reacție sunt mărimi de curent continuu proporționale cu variabilele respective. La metode de control scalar a acționărilor de curent alternativ variabilele principale sunt: frecvența și tensiunea sau curentul statoric.
Controlul vectorial include nu numai controlul amplitudinii, ci și a fazei variabilelor. Suportul matematic al acestei metode de control a fost prezentat la scrierea ecuațiilor generale ale mașinilor de curent alternativ sub formă vectorială, folosind fazorii spațiali. Controlul vectorial este fundamentul majorității sistemelor de acționare moderne și de înaltă performanță cu mașini de curent alternativ, permițând un control independent al cuplului respectiv al fluxului prin descompunerea fazorului spațial de curent statoric în două componente perpendiculare, într-un sistem de referință legat rigid de fluxul de orientare. Metoda controlului vectorial necesită măsurarea, calcularea sau estimarea atât a amplitudinii, cât și a poziției fluxului de orientare.
Figura 5.30 prezintă principalele tipuri de convertoare electronice folosite la controlul motoarelor de inducție.
Convertoare utilizate în controlul motoarelor de inducție
După cum se vede, în fig. 5.30 facem deosebire între reglarea frecvenței și reglarea alunecării. Reglarea frecvenței se folosește atât în controlul scalar cât și la controlul vectorial, dar reglarea alunecării se utilizează doar la controlul scalar.
Metodele moderne de control folosesc invertoare PWM cu convertoare cu circuit intermediar de tensiune. Numai într-un număr redus de situații se folosește doar reglarea tensiunii statorice. Sunt rare aplicațiile unde sunt necesare cicloconvertoare (la puteri de ordinul MW) sau convertoare indirecte de curent (la motoare cu puterea peste 2MW).
Reglarea prin comandă pe rotor se folosește rar la puteri sub 1MW.
Controlul scalar al turației motorului asincron
Turația motorului asincron se calculează cu relația n = n0(1 - s) sau . Rezultă că turația se poate comanda prin modificarea:
- frecvenței f1 a tensiunii de alimentare a statorului,
- alunecării s,
- numărului de perechi de poli p ale motorului.
Cu schimbarea numărului de poli nu ne ocupăm aici fiindcă nu este o metodă de reglare (comandă) continuă a turației. Rămâne ca soluție comanda (reglarea) frecvenței sau a alunecării.
Sistemele la care se controlează numai amplitudinea unei mărimi (flux, alunecare) se numesc sisteme cu control scalar.
Se întâlnește des menținerea constantă a raportului tensiune/frecvență, care înseamnă o amplitudine constantă a fluxului câmpului magnetic învârtitor. Această metodă se numește comandă cu flux constant sau U/f constant și este deosebit de utilă la acționările pompelor și ventilatoarelor, pentru a reduce costurile de energie.
Cu ajutorul comenzii cu flux constant este dificil de a obține cuplu însemnat la turații reduse sau în stare imobilă și de aceea nu se utilizează ca servoacționări.
Comanda electronică a turației motoarelor asincrone se împarte în două grupe mari:
- reglarea frecvenței,
- reglarea alunecării.
Reglarea frecvenței
Relația ne arată că turația câmpului învârtitor statoric, respectiv turația de sincronism a motorului, se poate modifica prin variația frecvenței f1. Datorită faptului că rețeaua de alimentare asigură frecvență constantă, motorul se alimentează de la un convertor de frecvență.
Reglarea alunecării
Alunecarea se definește cu relația , de unde n = n0(1 - s). Frecvența de alimentare fiind constantă și ca urmare , turația motorului se poate modifica prin variația alunecării s pentru care în cazurile practice încă întâlnite se modifică tensiunea aplicată statorului.
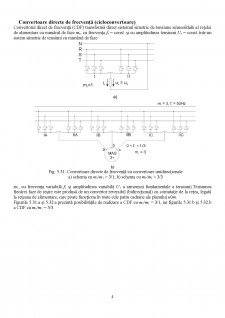
Convertoare directe de frecvență (cicloconvertoare)
Convertorul direct de frecvență (CDF) transformă direct sistemul simetric de tensiune sinusoildală al rețelei de alimentare cu numărul de faze mr, cu frecvența fr = const. și cu amplitudinea tensiunii Ur = const. într-un sistem simetric de tensiuni cu numărul de faze
Preview document











Conținut arhivă zip
- Actionari electrice cu motoare alimentate de la invertoare.doc
Alții au mai descărcat și


Introducere: Energia electrica reprezinta capacitatea de actiune a unui sistem fizico-chimic. Energia electrica prezinta o serie de avantaje in...
Te-ar putea interesa și

Am ales ca temă a lucrării de licenţă „Regulator de turaţie” deoarece această temă este de strictă actualitate, fiind cea mai modernă variantă de...

GENERALITĂŢI În sectorul energetic din majoritatea statelor europene s-au produs transformări majore determinate de necesitatea creşterii...

REZUMAT Această lucrare prezintă câteva generalităţi privind sistemele de acţionari electrice, noţiuni legate de utilizarea maşinilor de curent...

Introducerea pe scara larga a automatizarii si robotizarii, realizarea noilor tipuri de masini unelte cu comanda program au condus la necesitatea...

I. Generalităţi Controlul unei maşini-unelte sau utilaj implică domenii cum ar fi tipul de acţionare, modul de control şi limitarea mişcărilor pe...

MEMORIU JUSTIFICATIV În industrie, în mod deosebit în ultima vreme, capătă o largă utilizare acţionările electrice cu turaţie variabilă datorită...

Argument Stiinta este un ansamblu de cunostinte abstracte si generale fixate intr-un sistem coerent obtinut cu ajutorul unor metode adecvate si...

1. NOŢIUNI INTRODUCTIVE Pentru a sublinia importanta insuşirii cunostinţelor din domeniul ingineriei electrice, este necesar sa se arate că forma...