Cuprins
- Capitolul I- Studiu privind stadiul roboţilor mobile
- 1.1 Roboţi mobili
- 1.2 Clasificarea roboţilor mobili
- 1.3 Utilizări ale roboţilor mobili
- 1.4 Structura unui robot mobil
- 1.5 Acţionarea roboţilor mobili
- 1.6 Sistemul senzorial
- 1.7 Tipuri de roboti mobili
- Capitolul II- Studiul dinamicii robotului mobil cu roţi
- 2.1 Model cinematic
- Capitolul III- Proiectarea elementelor constructive
- 3.1 Elemente componente ale minirobotului
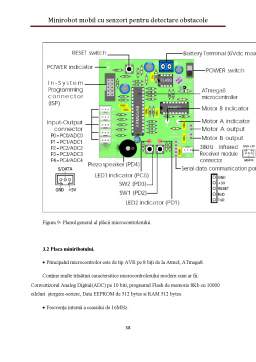
- 3.2 Placa minirobotului
- 3.3 Motoarele de curent continuu
- 3.4 Senzorul
- Capitolul IV- Proiectarea interfeţelor de comunicare
- 4.1 PX-400 Cutie Programată In-Sistem cu interfaţă serială
- 4.2 Interfaţa SPI
- 4.3 Cabluri de transfer a datelor
- Capitolul V- Programarea robotului
- 5.1 Instalarea AVR Studio
- 5.2 Crearea programului C în AVR Studio
- Bibliografie
Extras din proiect
Introducere
Unul din cele mai importante aspecte în evoluţia fiinţei umane este folosirea uneltelor care să simplifice munca fizică. În aceasta categorie se înscriu şi roboţii, ei ocupând totuşi o poziţie privilegiată datorită complexităţii lor.
Noţiunea de robot datează de peste 4 mii de ani. Omul şi-a imaginat dispozitive mecanizate inteligente care să preia o parte însemnata din efortul fizic depus. Astfel a construit jucării automate si mecanisme inteligente sau şi-a imaginat roboţii in desene, carti, filme "SF" etc.
Revoluţia informatică a marcat saltul de la societatea industrializată la societatea avansat informatizată generând un val de înnoiri în tehnologie şi în educaţie.Acest lucru a dus şi la apariţia roboţilor
Termenul "robot" a fost folosit in 1920 de cehul Karel Capek într-o piesa numită "Robotul universal al lui Kossum". Ideea era simplă: omul face robotul după care robotul ucide omul. Multe filme au continuat sa arate că roboţii sunt maşinării dăunătoare si distrugătoare.
Revoluţia informatică a marcat saltul de la societatea industrializată la societatea avansat informatizată generând un val de înnoiri în tehnologie şi în educaţie permiţând realizarea de roboţi.
Roboţii oferă beneficii substantiale muncitorilor, industriilor si implicit ţărilor. In situatia folosirii în scopuri paşnice, roboţii industriali pot influenţa pozitiv calitatea vieţii oamenilor prin înlocuirea acestora in spaţii periculoase, cu conditii de mediu daunatoare omului, cu conditii necunoscute de exploatare etc.
Domeniile de aplicare a tehnicii roboţilor se lărgesc mereu, ei putând fi utilizaţi în industrie, transporturi şi agricultură, în sfera serviciilor, în cunoasterea oceanului şi a spatiului cosmic, în cercetarea ştiinţifică etc.
Lucrarea prezintă modul de proiectare şi realizare a unui minirobot echipat cu microcontroler ATmega8-16PI şi diferiţi senzori aducând o contribuţie la dezvoltarea bazei teoretice şi practice
de studiu a microcontrollerelor Atmel şi a posibilităţilor nelimitate de dezvoltare de aplicaţii în domeniul roboticii.
CAPITOLUL I
STUDIU PRIVIND STADIUL ROBOŢILOR MOBILI
1.1 Roboţi mobili
Robotul mobil este un sistem complex care poate efectua diferite activităţi într-o varietate de situaţii specifice lumii reale. El este o combinaţie de dispozitive echipate cu servomotoare şi senzori (aflate sub controlul unui sistem ierarhic de calcul) ce operează într-un spaţiu real, marcat de o serie de proprietăţi fizice (de exemplu gravitaţia care influenţează mişcarea tuturor roboţilor care funcţionează pe pământ) şi care trebuie să planifice mişcările astfel încât robotul să poată realiza o sarcină în funcţie de starea iniţială a sistemului şi în funcţie de informaţia apriori existentă, legată de mediul de lucru.
Succesul în îndeplinirea acestor sarcini depinde atât de cunoştinţele pe care robotul le are asupra configuraţiei iniţiale a spaţiului de lucru, cât şi de cele obţinute pe parcursul evoluţiei sale.
Problemele specifice ce apar la roboţii mobili ar fi următoarele: evitarea impactului cu obiectele staţionare sau în mişcare, determinarea poziţiei şi orientării robotului pe teren, planificarea unei traiectorii optime de mişcare.
În cazul unui sistem robotic automat distribuit poziţiile spaţiale sunt de o extremă importanţă şi de ele depinde îndeplinirea scopurilor dorite şi funcţionarea întregului sistem. Cu alte cuvinte, robotul trebuie să fie capabil să-şi planifice mişcările, să decidă automat ce mişcări să execute pentru a îndeplini o sarcină, în funcţie de aranjamentul momentan al obiectelor din spaţiul de lucru.
Planificarea mişcărilor nu constă dintr-o problemă unică şi bine determinată, ci dintr-un ansamblu de probleme dintre care unele sunt mai mult sau mai puţin variante ale celorlalte.
Evitare coliziunii cu obstacole fixe sau mobile (de exemplu alţi roboţi mobili) aflate în spaţiul de lucru al robotului se poate face prin mai multe metode:realizarea unei apărători mecanice care prin deformare opreşte robotul, folosireasenzorilor care măsoară distanţa până la obstacolele de pe direcţia dedeplasare, folosirea senzorilor de proximitate, folosirea informaţiilor corelate de la mai multe tipuri de senzori.
Localizarea obiectelor se poate realiza şi prin contact fizic, dar acesta impune restricţii asupra vitezei de mişcare a structurii manipulate. Contactul fizic dintre robot şi obiectele din mediu generează forţe de reacţiune care modifică starea robotului. Vitezele mari de lucru fac ca efectele dinamice ale unui contact fizic cu obstacole sau obiecte manipulate să fie riscante (pot duce la deteriorarea obiectelor sau a robotului).
Preview document






























































































































Conținut arhivă zip
- Minirobot Mobil cu Senzori pentru Detectare Obstacole.doc
Alții au mai descărcat și

Baze de date multimedia Definirea conceptelor. Aplicatii. Data base - baza de date - este un grup de fisiere în care este înregistrata o multime...

Aplicatii client server Studiu de caz- Solutie de gestiune a Resurselor Umane si Salarizarii Solutiile de gestiune economica Mobius, sunt...

RETELE WIRELESS Introducere Cresterea popularitatii retelelor wireless a determinat o scadere rapida a pretului echipamentelor wireless...

“Feedback-ul este ceea ce lipsea din stiinta, in afara lui Newton”, spunea omul de stiinta britanic Steve Grand. “Noi credeam ca este un fenomen...

Programul realizeaza determinarea procesului de incalzire ,respectiv racire intr-o camera si a timpului (maxim respectiv minim) in functie de trei...

I. INTRODUCERE Dezvoltarea ştiinţei a demonstrat că cele mai spectaculoase progrese se obţin prin cercetare pluridisciplinară, situată la graniţa...

Scheme Hidraulice Prima schema Hidraulica este in figura 1: Figura 1 A doua schema hidraulica este in figura 2 : Figura 2 A treia schema...
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

INTRODUCERE Termenul de " robotics" (in traducere libera robotica) se refera la stiinta care se ocupa de studiul si utilizarea robotilor. Acest...