Extras din proiect
Mecatronica este definită simplu “Ştiinţa maşinilor inteligente”.O maşină inteligentă
cuprinde următoarele subsisteme de bază:
a. Subsistemul de percepţie, care are rolul de a colecta, stoca, procesa şi distribui informaţii despre
starea actuală a maşinii şi a mediului in care operează.
b. Subsistemul de cunoaştere, care are rolul de a evalua informaţiile colectate de subsistemul de
percepţie şi de a planifica acţiunile maşinii
c. Subsistemul de execuţie, responsabil cu desfăşurarea tuturor acţiunilor maşinii, pe baza
instrucţiunilor de la celelalte două subsisteme.
d. Subsistemul de autoîntreţinere are rolul de a menţine maşina in condiţii bune de funcţionare.
Acest subsistem asigură o monitorizare intermitentă a comportării maşinii pentru a preveni
eventualele defecte (autointreţinere preventivă) sau pentru a le sesiza imediat ce apar
(autodiagnostic). In cazuri particulare autointreţinerea poate insemna chiar şi autoreparare.
e. Subsistemul de conversie a energiei asigură cantitatea şi forma de energie necesară pentru ca
toate celelalte subsisteme să aibă o bună funcţionare.
Componentele fizice din structura acestor subsisteme sunt: senzorii şi traductorii,actuatorii,
microprocesoarele, reţelele de comunicaţii, dispozitivele de intrare/ieşire, efectorii finali, sursele de
energie etc.
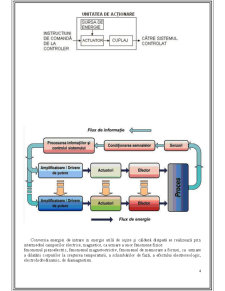
Funcţia de execuţie constă în a iniţia, controla, desfăşura şi încheia acţiunile maşinii,pe baza
instrucţiunilor primite de la cunoaştere şi de la percepţie. Acţiunile maşinii constituie interacţiunea
maşinii cu mediul său. Elementele principale din structura subsistemului de execuţie sunt actuatorii.
3
CAP.2 ACTUATORI
Pentru dezvoltarea fortelor si momentelor si realizarea miscarilor in sistemele mecatronice se
utilizeaza sisteme de actionare de cele mai diferite tipuri si forme de energie. Pentru cuprinderea
tuturor acestor dispozitive tehnice intr-o singura notiune, se utilizeaza, termenul de actuator (de la
verbul englez „to act” = a actiona).
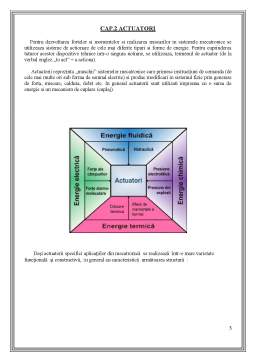
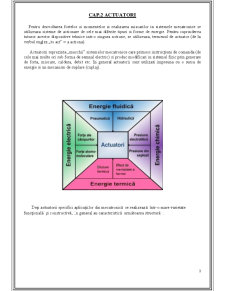
Actuatorii reprezinta „muschii” sistemelor mecatronice care primesc instrucțiuni de comanda (de
cele mai multe ori sub forma de semnal electric) si produc modificari in sistemul fizic prin generare
de forta, miscare, caldura, debit etc. In general actuatorii sunt utilizati impreuna cu o sursa de
energie si un mecanism de cuplare (cuplaj).
Deşi actuatorii specifici aplicaţiilor din mecatronică se realizează într-o mare varietate
funcţională şi constructivă, in general au caracteristică următoarea structură :
4
Conversia energiei de intrare in energie utilă de ieşire şi căldură disipată se realizează prin
intermediul campurilor electrice, magnetice, ca urmare a unor fenomene fizice:
fenomenul piezoelectric, fenomenul magnetostrictiv, fenomenul de memorare a formei, ca urmare
a dilatării corpurilor la creşterea temperaturii, a schimbărilor de fază, a efectului electroreologic,
electrohidrodinamic, de diamagnetism.
5
Mecanismul actuatorului transformă,amplifică şi transmite mişcarea făcand acordul cu
parametrii specifici scopului tehnologic.Actuatorii utilizaţi in mecatronică pot fi concepuţi ca şi
actuatori liniari sau rotativi,avand cursă limitată sau teoretic nelimitată, cu un element activ sau cu
mai multe elemente active in structură.
Preview document

























Conținut arhivă zip
- Actuatori si Motoare.pdf
Alții au mai descărcat și

GENERALITATI In procesele industriale trebuie actionate – puse in miscare – sisteme mecanice. Transformarea diferitelor forme de energie...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...

CAPITOLUL 1 ELEMENTE PRIVIND FORMAREA AMESTECULUI LA MOTORUL CU APRINDERE PRIN SCÂNTEIE PENTRU AUTOMOBILE 1.1 PARTICULARITATI ALE FORMARII...
Te-ar putea interesa și

Introducere Circumstanţele în care ne găsim astăzi în domeniul microcontrolerelor şi-au avut începuturile în dezvoltarea tehnologiei circuitelor...

Dezvoltarea societății informatizate nu putea să nu se regăsească în construcția unora dintre cele mai dinamice și utilizate produse ale economiei...

1.1 Conceptul de „Robotică” Robotica este acea parte a ştiinţei care se ocupă cu studiul operaţiilorumanoide şi se situează la frontiera mecanicii...

Capitolul 1 Mecanizare, automatizare, robotizare Concepte generale O societate industrializată avansată presupune o automatizare flexibilă şi...

Actuatoarele sunt dispozitive care produc miscare mecanica prin transformarea diferitelor forme de energie mecanica liniara sau rotativa. Un...

1 Introducere 1.1 Precizia Servomotoarelor Sisteme de poziționare necesare pentru multe aplicații de înaltă tehnologie trebuie să îndeplinească o...

1. Introducere Prognoza urmatorilor 10 ani privind protectia mediului impune ca obiective pentru dezvoltarea motoarelor cu aprindere prin scanteie...

Cap.I. Definiții și particularități ale sistemelor de urmărire I.1. Noțiuni introductive Sistem de urmărire = sistem de control al poziției,...