
Cuprins
- ÎNTRODUCERE 3
- l ALEGEREA MOTORULUI ELECTRIC SI CALCULUL CINEMATIC
- AL MECANIZMULUI DE ACTIONARE 4
- 1.1 ALEGEREA MOTORULUI ELECTRIC 4
- 1.2 DETERMINAREA ŞI DISTRIBUIREA RAPORTULUI DE TRANSMITERE AL M.A 6
- 1.3 DETERMINAREA PARAMETRILOR CINEMATICI ŞI DE FORŢĂ AI M.A 7
- 2 CALCULUL DE PROIECT AL ANGRENAJULUI REDUCTORULUI CILINDRIC 8
- 2.1 ALEGEREA MATERIALULUI ŞI CALCULUL TENSIUNILOR ADMISIBILE 8
- 2.2 DIMENSIONAREA ANGRENAJULUI CU ROŢI DINŢATE CILINDRICE 9
- 2.3 CALCULUL FORTELOR IN ANGRENAJ 12
- 2.4 CALCULUL DE VERIFICARE A ANGRENAJULUI 16
- 3 CALCULUL ARBORELUI 17
- 3.1 CALCULUL DE PREDIMENSIONARE AL ARBORILOR 17
- 3.2 CALCULUL DE DIMENSIONARE. 19
- 3.2.1. Alegerea prealabila a rulmentilor
- 3.2.2. Elaborarea schitei de dimensionare a reductorului
- 3.2.3. Calculul de dimensionare a arborelui pinion
- 3.2.4. Calculul de dimensionare a arborelui condus
- 3.3 PROIECTAREA CONSTRUCTIVA A ARBORELUI 19
- 4 CALCULUL RULMENTILOR 21
- 4.1 DETERMINAREA DURATEI DE FUNCTIONARE NECESARE PENTRU MA
- 4.2 DETERMINAREA CAPACITATII DINAMICE CONTRATANTE NECESARA PENTRU
- RULMENTI
- 4.2.1 Capacitatea potanta dinamica pentru rulmentii arborelui pinion
- 4.2.2 Capacitatea potanta dinamica pentru rulmentii arborelui condus
- 4.3 ALEGEREA FINALA A RULMENTILOR
- 5 PROIECTAREA CONSTRUCTIVA A ROTII DINTATE CILINDRICE 23
- 6 CALCULUL ANSAMBLARILOR PRIN PANA 31
- 6.1 CALCULUL ANSAMBLARILOR PRIN PANA PENTRU ARBORELE PINION 45
- 6.2 CALCULUL ANSAMBLARILOR PRIN PANA PENTRU ARBORELE CONDUS 45
Extras din proiect
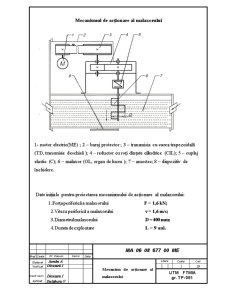
1- motor electric(ME) ; 2 – baraj protector ; 3 – transmisia cu curea trapezoidală (TD, transmisie deschisă ); 4 – reductor cu roţi dinţate cilindrice (CIL); 5 – cuplaj elastic (C); 6 – malaxor (OL, organ de lucru ); 7 – amestec; 8 – dispozitiv de închidere.
Date iniţiale pentru proiectarea mecanismului de acţionare al malaxorului:
1..Forţa periferică a malaxorului F = 1,6 kN;
2.Viteza periferică a malaxorului v = 1,6 m/s;
3.Diametrul malaxorului D = 400 mm;
4.Durata de exploatare L = 9 ani.
ÎNTRODUCERE.
Elaborarea acestui proiect contribuie la consolidarea materiei teoretice a bazelor proiectării maşinilor, conceperea mai profundă a procesului calcul – proiectare – executare a organelor de maşini şi acumularea cunoştinţelor necesare pentru elaborarea proiectelor de curs la disciplinele de specialitate şi a celui de diplomă.
Se numeşte reductor, mecanismul format din transmisii dinţate sau melcate şi serveşte pentru transmiterea relaţiei de la arborele motorului la arborele motorului la arborele maşinii de lucru.
Reductorul este un mecanism care micşorează viteza unghiulară şi măreşte momentul de rotaţie în mecanismele cu acţiune de la motorul electric la maşina de lucru.
Reductorul are menirea de a micşora viteza şi corespunzător de a mări momentul relaţiei a arborelui în comparaţie cu cel condus.
Reductoarele se clasifică după:
- tipul transmisiei;
- dinţate;
- melcate;
- numărul de trepte ( cu o treaptă, cu două treapte, etc);
- tipul roţilor dinţate ( cilindrice, conice, cilindro - conice);
- aşezarea arborilor reductorului în spaţiu ( orizontal, vertical).
Reductorul pe larg se întrebuinţează în diferite ramuri ale industriei constructoare de maşini, de aceea există şi mai multe tipuri de maşini.
Pentru a micşora dimensiunile organelor de maşini, în industria constructoare de maşini întrebuinţează motoarele – reductoarele ce constau dintr-un agregat în care sunt unite motorul şi reductorul.
l ANALIZA CINEMATICĂ A MECANISMULUI DE ACŢIONARE
1.1 Alegerea motorului electric
1.1.1 Determinăm puterea necesară OL din cadrul maşinii proiectate Pot , kW:
unde F este forţa periferică a OL, F =1,6 kN; ν este viteza periferică a OL, ν =1,4m/s.
=1.6 * 1.4 = 2,24 kW.
1.1.2 Determinăm randamentul total a MA,
unde este randamentul transmisiei deschise (curea trapezoidală), primim
= 0.95
- randamentul angrenajului cilindric (reductor cu roţi dinţate cilindrice),
primim =0.93
- randamentul cuplajului, primim =0.98
- randamentul unei perechi de rulmenţi, primim =0.99
= 0.95 * 0.93 * 0.98 * =0.84 ;
1.1.3 Determinăm puterea necesară ME - , kW :
kW
1.1.4 Determinarea puterii nominale a :ME Pnom , kW :
Valoarea puterii nominale a ME se alege după următorul criteriu :
Deci = 3.0 kW;
1.1.5 Determinăm turaţia arborelui OL- , tur/min;
Preview document


































Conținut arhivă zip
- Alegerea Motorului Electric si Calculul Cinematic al Mecanismului de Actionare al Malaxorului.doc
Alții au mai descărcat și

TEMA DE PROIECT Sa se proiecteze un malaxor melcat pentru pasta de carne având capacitatea de lucru Q=400 l si un singur melc . Antrenarea se va...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...
Te-ar putea interesa și

Introducere Organele de mașini sunt piese (eventual ansambluri de piese), având rol funcțional utilitar care intră în compunerea...

Sarcina pentru proiectul de an De elaborat proiectul mecanismului de actionare a unui snac-malaxor Date initiale pentru proiectare: 1. Forta de...