
Cuprins
- 1. Memoriu de prezentare 1
- 1.1 Descrierea generala a podului rulant multioperational din punct de vedere constructiv si functional 1
- Descrierea functionarii podului rulant multioperational (P. R. M) 2
- 1.2 Caracteristici tehnice principale 3
- 1.2.1.Caracteristici dimensionale: 3
- 1.2.2.Caracteristici functionale 3
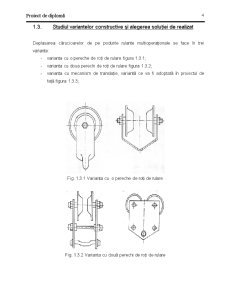
- 1.3 Studiul variantelor constructive si alegerea solutiei de realizat 4
- 2. Calculul aproximativ al caruciorului 6
- 2.1 Calculul fortelor care actioneaza pe grinda 6
- 2.2 Calculul reactiunilor 6
- 2.3 Calculul momentelor de încovoiere 7
- 2.4 Calculul tensiunilor produse de momentele de încovoiere 8
- 3. Consideratii generale privind calculul structurilor static nedeterminate 10
- 3.1 Stabilirea gradului de nedeterminare statica 10
- 3.2 Aspecte fundamentale ale metodei generale de calcul 10
- 3.3 Alegerea si semnificatia sistemului de baza 11
- 3.4 Prezentarea metodei eforturilor 12
- 3.5 Forma canonica a ecuatiilor de conditii 13
- 4. Elemente initiale pentru calculul static al caruciorului 14
- 4.1 Stabilirea profilului de ansamblu al caruciorului 14
- 4.2 Stabilirea fortelor exterioare de încarcare 15
- 4.3 Stabilirea unui nou profil de ansamblu al caruciorului si al unei noi încarcari exterioare 16
- 4.4 Alegerea sistemului de baza 22
- 5. Calculul caracteristicilor geometrice ale sectiunilor transversale, pentru structura de rezistenta a caruciorului.. 24
- 6. Calculul si trasarea diagramelor de eforturi 30
- 6.1 Conventii la trasarea diagramelor de eforturi 31
- 6.2 Trasarea diagramelor de moment pentru sarcinile-unitate 32
- 6.3 Trasarea diagramelor de eforturi pentru sarcinile exterioare 42
- 7. Calculul coeficientilor de influenta 46
- 7.1 Metoda de calcul utilizata la determinarea coeficientilor de influenta 46
- 7.2 Calculul coeficientilor de influenta din matricea 47
- 7.3 Sistemele de ecuatii de conditie si solutiile sistemului 49
- 8. Calculul eforturilor finale si a tensiunilor 50
- 8.1 Calculul eforturilor finale 50
- 8.2 Calculul tensiunilor 58
- 9. Calculul de rezistenta a caruciorului 60
- pe calculator folosind programul COSMOS 60
- Anexa 1. 62
- REZULTATELE ANALIZEI STATICE 62
- Anexa 2.. 74
- 10. Calculul tehnologiei de sudare 78
- 10.1 Alegerea structuri sudate si a procedeelor de sudare 78
- 10.2 Sudarea cap la cap a componentelor având grosimea 79
- 10.2.1 Sudarea manuala cu electrozi înveliti (S.E.) 79
- 10.2.2 Sudarea mecanizata (S.F.) 81
- 10.3 Sudarea cap la cap a componentelor având grosimea 82
- 10.3.1 Sudarea manuala cu electrozi înveliti (S.E.); 82
- 10.3.2 Sudarea mecanizata (S.F.) 84
- 10.4 Sudarea cap la cap a componentelor având grosimea 86
- 10.4.1 Sudarea manuala cu electrozi înveliti (S.E.) 86
- 10.4.2 Sudarea mecanizata (S.F.) 88
- 11. CAIET DE SARCINI.. 91
Extras din proiect
1. Memoriu de prezentare
1.1. Descrierea generala a podului rulant multioperational din punct de vedere constructiv si functional
Podul rulant multioperational se compune din:
- carucior 5000 (800) KN;
- mecanism de deplasare pod;
- constructie metalica;
- instalatia electrica.
Carucior 5000 (800) KN
Mecanismul de ridicare principal (5000 KN) este actionat de doua motoare electrice prin intermediul unui reductor cu doua iesiri. Iesirile reductorului actioneaza câte un pinion, care la rândul lor prin câte o coroana dintata pun în miscare cei 2 tamburi. Caruciorul de 5000 KN rotit printr-un mecanism cu reductor, este montat în traversa sustinuta de doua ramuri de cablu. Deplasarea caruciorului se face cu ajutorul a patru actionari de capat. Sasiul este o constructie sudata de tip cheson.
Mecanismul de deplasare pod este compus din patru actionari de capat, formate din:
- balancier actionat ( );
- ax cardanic (AC – 60 – 2);
- reductor de tip 2RN 32;
- cuplaj elastic de frâna;
- motor electric;
- 4 balancieri liberi de .
Constructia metalica este alcatuita din urmatoarele ansamble principale:
- grinzile principale – 2 grinzi sistem cu dimensiunile interioare de 2000 2900mm;
- grinzile de capat;
- cabina de comanda.
Sina de rulare a caruciorului este fixata prin suruburi, de talpa superioara, deasupra inimii sinei.
Instalatia electrica are urmatoarele elemente componente:
- iluminat, semnalizare si protectie;
- echipament pentru actionarea mecanismului de ridicare principal;
- echipament pentru actionarea mecanismului de deplasare carucior;
- echipament pentru actionarea mecanismului de deplasare pod;
- echipament pentru actionarea mecanismului de ridicare auxiliar;
- echipament pentru actionarea mecanismului de rotire.
Descrierea functionarii podului rulant multioperational (P. R. M)
Mecanismul de ridicare principal are doua stari de functionare:
- functionarea cu un motor cu viteza de 1,84 m/min;
- functionarea cu ambele motoare cu viteza de 3,68 m/min (viteza nominala).
Pentru marirea sigurantei în exploatare s-a prevazut închiderea lantului cinematic între cei doi tamburi printr-un arbore de legatura între „2” cuplaje dintate cu dantura înclinata. Datorita danturii înclinate apare o forta axiala care deplaseaza arborele de legatura, ceea ce duce la actionarea pârghiei unui întrerupator care comanda deconectarea instalatiei electrice rezultând frânarea cu ajutorul frânelor cu banda si a frânelor cu disc.
Preview document



























































































Conținut arhivă zip
- Calculul si Proiectarea Constructiei Metalice a Caruciorului Podului Multioperational.doc
Alții au mai descărcat și

Introducere Evoluţia progresivă a autovehiculului încă de la apariţia sa, a fost impusă de conştientizarea omului, că acest sistem, la început...

1.Elemente constructiv-funcţionale ale piesei 1.1. Schiţa piesei Pe desenul de execuţie al piesei au fost notate cu Sn suprafeţele acestuia care...

TEMA PROIECTULUI: Sa se realizeze tehnologia de prelucrare a piesei Flansa ovala , avându-se în vedere un lot de 500 de bucati. CAPITOLUL 1....

Sa se proiecteze procesul tehnologic de fabricatie (pentru o productie de 10000 bucati pe an ) si reconditionare (pentru o productie de 1000 de...


1) Documentare asupra tipurilor de sisteme de suspensie/direcţie utilizate la autoturismele de tip Mercedes-Benz Clasa S 1.1.Date tehnice: În...

Introducere Deplasarea automobilului în orice regim, pe orice categorie de drum este însoţită de apariţia şocurilor şi vibraţiilor. De altfel,...

Cap I. Organizarea generala si alegerea parametrilor principali I.1. Studiul soluţiilor similare: Pentru abordarea proiectării unui nou tip de...