Cuprins
- Anexă la proiect 2
- CAPITOLUL I. ANALIZA STRUCTURALĂ 4
- Schema cinematică a mecanismului 4
- Familia mecanismului 4
- Interpretarea valorii mobilităţii 5
- Schema cinematica 5
- Schema structurală 6
- Descompunerea mecanismelor 6
- Relaţia structurală 7
- Contururi cinematice 7
- CAPITOLUL II. DETERMINAREA CONDIŢIEI DE EXISTENŢĂ A MANIVELEI CONDUCĂTOARE 8
- CAPITOLUL III. ANALIZA CINEMATICĂ GRAFOANALITICĂ ÎN TREI POZIŢII UNGHIULARE ALE ELEMENTULUI CONDUCĂTOR ECHIDISTANTE ÎNCEPÂND CU POZIŢIA INIŢIALĂ φ10 9
- 3.1. Analiza poziţiilor. Analiza cinematică 9
- 3.2.Determinarea vitezelor 14
- 3.3. Determinarea acceleraţiilor 23
- CAPITOLUL IV. ANALIZA CINETOSTATICA GRAFO-ANALITICA ÎN POZIŢIILE DE LA CAP.III 3Bibliografie 48
Extras din proiect
Anexă la proiect:
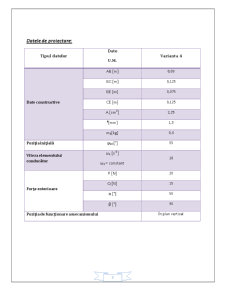
Datele de proiectare:
Tipul datelor Date
U.M. Varianta 4
Date constructive AB [m] 0,03
BC [m] 0,125
BE [m] 0,075
CE [m] 0,125
A [cm2] 2,25
ᵟ[mm] 1,5
m3[kg] 0,4
Poziţia iniţială ϕ10 [°] 55
Viteza elementului conducător ω1 [s-1]
ω1 = constant 18
Forţe exterioare P [N] 20
Q [N] 15
α [°] 50
β [°] 90
Poziţia de funcţionare a mecanismului În plan vertical
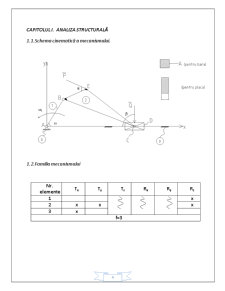
CAPITOLUL I. ANALIZA STRUCTURALĂ
1.1.Schema cinematică a mecanismului.
1.2.Familia mecanismului
Nr. elemente Tx Ty Tz Rx Ry Rz
1
x
2 x x x
3 x
f=3
1.3.Interpretarea valorii mobilităţii
M_f=(6-f)∙m- ∑_(k=1+f)^5〖(k-f)∙C_k 〗
k = 4;
C4 = 0;
C5 = 4: 1 – Translaţie (D)
Preview document













































Conținut arhivă zip
- Mecanism RRT.docx
Te-ar putea interesa și


Tema de proiect: MECANISM PĂŞITOR ARTICULAT Proiectul de diplomă, prezentat în paginile ce urmează, cu titlul de mai sus, este făcut sub...

CAP. 1 INTRODUCERE 1.1. Conceptul de Sistem Mecanic In general, prin sistem se întelege o mulţime de elemente, între care se stabilesc legături...



1.Introducere Mecanismele cu opriri, sau mecanismele cu miscare intermitenta tipice sunt mecanismele cu cama si mecanismele cu cruce de Malta. In...

1. ANALIZA STRUCTURALA A MECANISMELOR CU PARGHII 1.1 DETERMINAREA FAMILIEI SI A GRADULUI DE MOBILITATE Mecanismul reprezinta un sistem tehnic ale...

Fie dat ansamblu unei prese mecanice de o tonă forţa format din următoarele: - motor de acţionare (electric) - mecanism de transmitere (roţi...