
Extras din proiect
CAPITOLUL I.
ANALIZA STRUCTURALĂ A MECANISMULUI
CU PÂRGHII
1.1 Determinarea familiei si a gradului de mobilitate
Prin familia f a unui mecanism se intelege numarul de restricţii comune impuse tuturor elementelor cinematice.
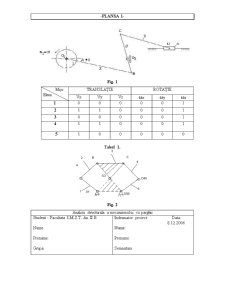
Pentru determinarea familiei mecanismului din figura 1. (Plansa 1) se va utiliza metoda tabelară, care constă în înscrierea într-un table a posibilităţilor de mişcare pe care le au elementele cinematice raportate la un sistem triortogonal de axe de coordinate Oxyz.
Se completează tabelul mişcărilor independente ale celor 5 elemente cinematice faţă de sistemul de axe Oxyz cu originea in articulaţia fixă O1.
Se observă că:
- Elementul 1- manivela O1A are o miscare de rotaţie în jurul axei Oz.
- Elementul 2- biela AB execută o miscare plană de rototranslaţie în planul Oxy.
- Elementul 3- balansierul O3B are o mişcare de rotaţie oscilantă în jurul axei Oz.
- Elementul 4- biela CD descrie o miscare plan-paralelă în planul Oxy.
- Elementul 5- numit culisor(piston), are o miscare de translaţie de-a lungul ghidajului fix(numit şi glisieră), paralel cu axa Ox.
Mecanismul analizat este de familia f=3, fiind un mecanism plan.
Ştiind familia mecanismului, se poate determina gradul de mobilitate al acestuia.
M3=3n-2C5+C4
N= ∑Ck-n
n=3;
C5=7;
M3=1;
N=2;
Mo=6n-5 C5 =-5
n- numarul de elemente cinematice mobile
C5- numarul cuplelor de clasa a V-a
1.2 Reprezentarea schemei structurale a mecanismului
Schema structurală este o reprezentare convenţională a elementelor cinematice şi a cuplelor cinematice echivalente. Acesta se alcatuieste pornind de la schema cinematică a mecanismului, având următoarele obiective:
- echivalarea cuplelor superioare.
- Eliminarea suprapunerii de cuple.
- Scoaterea în evidenţă a rangurilor, astfel încât un element de rang j se va reprezenta printr-un poligon cu j laturi.
Scopul realizării schemei structurale este de a pune in evidenţă şi elementele conducătoare ce intră în componenţa mecanismului.
Grupele structurale sunt lanţuri cinematice simple, care pot fi studiate, independent din punct de vedere cinematic.
Grupele structurale adăugate sau eliminate din structura unui lanţ sau mecanism, nu îi modifica gradul de libertate, respectiv cel de mobilitate. Pentru aceste grupe sau definit:
- Clasa unei grupe cinematice- este determinată de numarul cel mai mare de cuple are marginescun contur închis rigid sau deformabil in structura grupei.
- Ordinul unei grupe cinematice- este dat de numarul cuplelor exterioare alei grupei, cu care aceata se poate lega la un lant cinematic
Numarul de contururi deformabile independente (N) al unui mecanism se calculează cu ajutorul formulei:
N= ∑Ck-n;
În figura 2. este reprezentată schema structurală a mecanismului în care s-a pus în evidenţă rangul elementului 3. şi s-a eliminat suprapunerea de cuple din D.
Dupa construirea schemei structurale, pornind de la elementul conducator se extrag succesiv grupe structurale.
Schema structurală pentru mecanismul analizat fig. 2. arată ca acesta derivă din lanţul cinematic Watt.
Această schemă se descompune în:
- elementul conducator 1.
- Diada RRR formată din elementele 2 şi 3, clasa II, ordinul 2, aspect 1;
- Diada RRT formată din elementele 4 şi 5, clasa II, ordinul 2, aspect 2.
Mecanismul este de clasa II, ordinul 2 şi poate fi simbolizat sub forma R-RRR-RRT.
Analiza cinematica
Analiza cinetostatica
Preview document











































Conținut arhivă zip
- GRAFICE
- aD_pt_coeficienti.xls
- vD_pt_coeficienti.xls
- PROGRAM DE CALCUL
- ADI.BAK
- ADI.EXE
- ADI.PAS
- ADI1.BAK
- ADI1.DAT
- ADI2.BAK
- ADI2.DAT
- ADI3.BAK
- ADI3.DAT
- ADI4.DAT
- ADI5.DAT
- ADI6.DAT
- ADI7.DAT
- MEC1.TPU
- MECANISM.PAS
- MECANISM.TPU
- MECINDR.PAS
- MECINDRCINCINETO.PAS
- TP01A426.$$$
- TP0F8F0C.$$$
- TP113821.$$$
- TP142399.$$$
- TP15919E.$$$
- TP15DD1B.$$$
- TP166A35.$$$
- TURBO.EXE
- TURBO.TP
- TURBO.TPL
- ROATA DINTATA
- ROATA DINTATA.dwg
- roata_dintata_ady_623B.mcd
- PLANSA 1.doc
- PLANSA 6.doc
- PLANSA 7A.doc
- PLANSA 7B.doc
- PLANSA 9.doc
- PROIECT.doc
Alții au mai descărcat și

Introducere Elaborarea acestui proiect contribuie la consolidarea materiei teoretice a bazelor proiectării maşinilor, conceperea mai profunda a...

CAP. 1 INTRODUCERE 1.1. Conceptul de Sistem Mecanic In general, prin sistem se întelege o mulţime de elemente, între care se stabilesc legături...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...

-Definiţie -Clasificare -Parţi componente -Definiţie – automobilul este un vehicul rutier carosat şi suspendat elastic pe cel puţin trei roţi,...
Te-ar putea interesa și

Introducere Contextul socio-politic actual este înţesat de diverse intrigi, dependente într-un mod direct de conflictele de interese de diferite...

Sinteza Dimensională Sinteza dimensională constă in determinarea parametrilor constructivi ai mecanismului pornind de la condiţiile funcţtionale...

Tema de proiect: MECANISM PĂŞITOR ARTICULAT Proiectul de diplomă, prezentat în paginile ce urmează, cu titlul de mai sus, este făcut sub...

PROIECTAREA UNUI MECANISM CU BARE Sa se efectueze analiza structurala,cinematica si cinetostatica pentru mecanismul manivela-piston...

Capitolul 1. Date inițiale Să se proiecteze un mecanism de acționare a cupei pentru un excavator cu cupă inversă și să se studieze comportarea...

CAPITOLUL 1. CARACTERIZAREA MECANISMELOR DECIZIONALE LA NIVELUL UNIUNII EUROPENE În cadrul Uniunii europene spre deosebire de instituţiile...

Introducere Economia de piaţă situează în centrul activităţii economice întreprinderea. Rezultatele obţinute de întreprinderi determină pozitiv...

I. Introducere Politica monetară este o componentă de bază a politicii economice, alături de alte componente, în principal politica fiscală si...