Cuprins
- INTRODUCERE 3
- 1 ALEGEREA MOTORULUI ELECTRIC ŞI CALCULUL CINEMATIC AL
- MECANISMULUI DE ACŢIONARE 4
- 1.1 ALEGEREA MOTORULUl ELECTRIC 4
- 1.2 DETERMlNAREA ŞI DISTRIBUIREA RAPORTULUI TOTAL DE TRANSMlTERE AL MA 5
- 1.3 DETERMINAREA PARAMETRJLOR ClNEMATlCI ŞI DE FORŢĂ AI ARBORILOR MA 5
- 2. CALCULUL DE PROIECT AL ANGRENAJULUI REDUCTORULUI 7
- 2.1 ALEGEREA MATERIALULUI ANGRBNAJULUI ŞI DETERMINAREA TENSIUNlLOR ADMISIBILE 7
- 2.2 DIMENSlONAREA ANGRENAJULUICU ROŢl DINŢATE CONICE 8
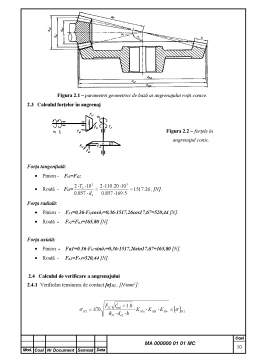
- 2.3 CALCULUL FORŢELOR ÎN ANGRENAJ 10
- 2.4 CALCULUL DE VERIFICARE A ANGRENAJULUI 10
- 3 CALCULUL ARBORILOR 13
- 3.1 CALCULUL DE PREDIMENSlONARE 13
- 3.2 CALCULUL DE DIMENSIONARE 13
- 3.2.1 ALEGEREA PREALABILĂ A RULMENŢILOR 13
- 3.2.2 ELABORAREA SCHIŢEI DE DIMENSIONARE A REDUCTORULUI CONIC 13 3.2.3 CALCULUL DE DIMENSIONARE A ARBORELUI-PINION 17
- 3.2.4 CALCULUL DE DIMENSIONARE A ARBORELUI CONDUS 22
- 4. CALCULUL RULMENŢILOR 27
- 4.1 DETERMINAREA DURATEI DE FUNCŢIONARE NECESARE PENTRU MA 27
- 4.2 DETERMINAREA CAPACITĂŢII DINAMlCE PORTANTE NECESARE A RULMENŢILOR 27
- 4.2.1 CAPACITATEA PORTANTĂ DINAMICĂ NECESARĂ PENTRU RULMENŢII ARBORELUI PINION: 27
- 4.2.2 CAPACITATEA PORTANTĂ DINAMICĂ NECESARĂ PENTRU RULMENŢII ARBORELUI CONDUS 28
- 4.3 ALEGEREA FlNALĂ A RULMENŢlLOR 28
- 5. CALCULUL ASAMBLĂRILOR PRIN PANĂ 30
- 5.1 CALCULUL ASAMBLĂRll PRIN PANĂ PENTRU ARBORELE-PINION 30
- 5.2 CALCULUL ASAMBLĂRlLOR PRlN PANĂ PENTRU ARBORELE CONDUS 31
- BIBLIOGRAFIE 33
Extras din proiect
Întroducere
Transmisiile mecanice dintre motor si masina de lucru maresc sau micsoreaza viteza, respectiv, momentul transmis; modifica traiectoria sau caracterul miscarii; modifica sensul sau planul de miscare; regleaza si modifica continuu viteza; sumeaza miscare si momentul de transmis pe la mai multe motoare sau distribuie miscarea la mai multe masini sau organe de lucru; protejeaza organele masinii motoare contra suprasarcinilor.
Transmisiile mecanice pot fi prin angrenare si prin frecare. Transmisiile prin angrenare (roti dintate) cu raport de transmitere constant montate în carcase închise se numesc reductoare când reduc turatia (i > 1) si amplificatoare când maresc turatia (i < 1). Când acestea permit variatie de viteza în trepte se numesc cutii de viteze.
Reductoarele servesc la micsorarea numarului de turatii si la cresterea momentelor de torsiune.Reductoarele de uz general sunt normalizate,STAS 6055-68 si 6848-68 prevazând caracteristicile si simbolozarea lor.Tipul constructiv de reductor este determinat de cerintele impuse în tema de proiect ca si conditiile de functionare.Se disting reductoare cu angrenaje cilindrice cu 1,2 sau 3 trepte; cu angrenaje conice si cilindrice si reductoare cu angrenaje melcate în combinatie sau nu, cu angrenaje cilindrice.
Proiectarea unui reductor presupune cunoasterea unor parametri de baza : raportul de transmitere, alegerea numarului de dinti, elemente de constructie a lagarelor, carcasei, probleme de ungere, lubrifianti si montaj.
Raportul de transmitere care trebuie realizat cu un reductor este precizat în tema de proiectare.Repartizarea rationala a raportului de transmitere total pe treptele ce compun reductorul, este deosebit de importanta si influenteaza direct constructia reductorului.În vederea folosirii cât mai judicioase a spatiului din carcasa reductorului, precum si pentru a asigura conditii de ungere a angrenajelor, la reductoarele la care arborii sunt asezati în plan orizontal, este necesar a se lua raportul de transmitere partial pe treapta rapida cu valoare mai mare, ca de exemplu : pentru reductorul cu 2 trepte ; la cel cu trei trepte diferenta între rapoartele partiale fiind de circa 30%.
Alegerea numarului de dinti la pinion este conditionata de rezistenta angrenajului la cele doua solicitari : încovoiere si presiune de contact; pentru a folosi economic materialul se pune conditia realizarii rezistentelor limita la ambele solicitari.Pentru calculul arborilor si lagarelor din componenta reductoarelor, este necesar sa se ia în considerare fortele ce provin din angrenaj si sensul lor functie de înclinarea dintilor si sensul de rotatie a dintilor.
1 ALEGEREA MOTORULUI ELECTRIC ŞI CALCULUL CINEMATIC AL MECANISMULUI DE ACŢIONARE
1.1 Alegerea motorului electric
1.1.1 Determinăm puterea necesară organului de lucru (OL) din cadrul maşinii proiectate Pol, [kN]:
Pol=Ft•vol,
unde Ft forţa de tracţiune a OL, Ft=2,2 [kN];
vol-viteza liniară a OL, vol=1,4 [m/s].
Pol=2200 N •1,4 m/s =3080 W =3,08 [kW]
1.1.2 Determinăm randamentul orientativ al mecanismului de acţionare (MA), ηma:
ηma=ηc•ηcon•η3rul- ηlanţ ,
unde ηc – randamentul cuplajului, acceptăm ηc=0,98
ηcon este randamentul angrenajului reductorului, acceptăm ηcon=0,95
ηrul – randamentul unei perechi de rulmenţi, acceptăm ηrul=0,992
ηlanţ - randamentul transmisiei prin angrenaj cilindric, acceptăm ηlanţ =0,90
[*, tab. 2. 1, pag. 7]
ηma=0,98•0,95•0,9923•0,90=0,82
1.1.3 Determinăm puterea necesară pe arborele motorului electric (ME) P , [kW]:
P = = =3,8 [kW].
1.1.4 Determinăm puterea nominală a ME – Pnom , [kW], acceptăm în continuare Pnom=4,0 [kW].
În conformitate cu recomandările [*, pag.13] şi în corespundere cu [*, tab. S3,anexa 2], acceptăm în continuare Pnom = 4,0 [kW].
1.1.5 Alegem prealabil tipul motorului electric.
Deoarece pentru Pnom=4,0 [kW] îi corespunde mai multe tipuri de ME cu număr diferit de turaţii, în conformitate cu recomandările [*, pag.13] şi în corespundere cu [*, tab. S3, anexa 2], alegem prealabil următoarele două motoare electrice:
Tabelul 1.1- Caracteristica tehnică pentru o variantă de ME aleasă prealabil.
Varianta
Modelul ME Caracteristica tehnică
Puterea nominală
Pnom , [kW] Turaţia asincronă
nme , [min -1] Turaţia nominală
Nnom , [min -1]
1. 4AM132S6Y3 4,0 1000 950
1.2 Determinarea şi distribuirea raportului total de transmitere al MA
1.2.1 Determinăm turaţia arborelui OL - nol, [min-1]:
nol =
unde vol este viteza OL, vol=1,4 m/s
D – diametrul tamburului, D=275 mm
nol= =97 [min-1]
1.2.2 Determinăm rapoartele de transmitere ale MA pentru varianta de ME, ima:
Ima= = =9,79
1.2.3 Determinăm rapoartele de transmitere a treptelor MA:
ima=ired •itd
unde ired , itd sînt rapoartele de transmisie ale reductorului şi, respectiv, ale transmisiei prin angrenaj cilindric deschis. În conformitate cu recomandările [*, pag.14] şi în corespundere cu [*,tab. 2.2,pag.15],
Preview document
































Conținut arhivă zip
- Mecanismul de Actionare a Elevatorului cu Cause.doc
Alții au mai descărcat și

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...
Te-ar putea interesa și

INTRODUCERE Mecanica, veche știință a naturii, împreună cu toate disciplinile care au derivat din ea, încadrate sub denumirea de Mecanică...

INTRODUCERE Mecanica, veche știință a naturii, împreună cu toate disciplinile care au derivat din ea, încadrate sub denumirea de Mecanică...