
Extras din proiect
Tema de proiect
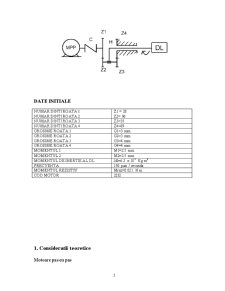
DATE INITIALE
NUMAR DINTI ROATA 1 Z1 = 28
NUMAR DINTI ROATA 2 Z2= 96
NUMAR DINTI ROATA 3 Z3=35
NUMAR DINTI ROATA 4 Z4=89
GROSIME ROATA 1 G1=3 mm
GROSIME ROATA 2 G2=3 mm
GROSIME ROATA 3 G3=4 mm
GROSIME ROATA 4 G4=4 mm
MOMENTUL 1 M1=2.5 mm
MOMENTUL 2 M2=3.5 mm
MOMENTUL DE INERTIE AL DL Jdl=6.2 x 10-7 Kg m2
FRECVENTA 150 pasi / secunda
MOMENTUL REZISTIV Mrez=0.021 N m
COD MOTOR 2232
1. Consideratii teoretice
Motoare pas cu pas
Din punct de vedere al electronicii discrete s-au dezvoltat elemente componente pentru comanda semnalelor discontinue folosind tehnica numerica.
S-a eliminat dezavantajul miscarii continue, sau analogice, a elementelor de executie.
Datorita aparitiei materialelor magnetice cu performante ridicate, s-au dezvoltat diferite tipuri de motoare electrice: motoare de CC, servomotoare de CC, servomotoare de CA.
Toate elementele au proprietatea de a transforma comanda prin impulsuri in miscare incrementala la arborele motorului.
Clasificare
Motoarele pas cu pas
1. solenoidale
2. cu reductanta variabila a) miscare liniara
b) miscare rotatie
Dupa constructia statorului: a) monostatoric
b) polistatoric
3. cu magnet permanent a) in stator
b) in rotor
4. hibrid - prezinta un magnet permanent si reductanta variabila
5. electromecanice sau motoare electrohidraulice
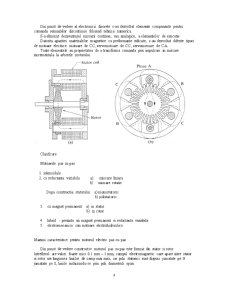
Marimi caracteristice pentru motorul electric pas cu pas
Din punct de vedere constructiv motorul pas cu pas este format din stator si rotor.
Intrefierul are valori foarte mici 0.1 mm – 1 mm, campul electromagnetic care apare intre stator si rotor are lungimea liniilor de camp mai mici, iar polii statorici sunt dispusi jumatate pe N jumatate pe S, liniile inchizandu-se prin poli diametrali opusi.
Θp = 2 π / ps × zr = 2 π / 4*50 = 1.8 º
Viteza unghiulara a rotorului
f – frecventa [p/s]
N – numar pasi pe rotor
N = m * zr (m – numar faze, zr – dinti rotorici).
La motoarele pas cu pas cu reductanta variabila, pozitia de echilibru stabil se obtine atunci cand axa dintelui rotoric coincide cu cea a dintelui statoric si se obtine reductanta minima a circuitului magnetic.
Pozitia de echilibru instabil se obtine atunci cand axa dintelui statoric coincide cu axa golului dintre cei doi dinti rotorici.
Avantaje
Dezavantaje
Mai fiabile decat cele cu miscare continua
Frecventa maxima de comanda are valori mari, rezulta viteze mari
Constructia mecanica este mai simpla, unghiul de pas poate fi micsorat
Sunt bidirectionale
Schimbarea sensului de rotatie se face inversand succesiunea fazelor de alimentare
Nu memoreaza pozitia
Nu are cuplu electromagnetic in absenta alimentarii fazelor
Daca motorul este alimentat in secventa simpla, faza cu faza, atunci cand cuplul de frecare este mic, scade cuplul electromagnetic.
unde M = cuplul electromagnetic al motorului, iar p este numarul de perechi de poli magnetici
Preview document



















Conținut arhivă zip
- Modelarea si Simularea Functionarii unui Motor Electric Pas cu Pas in Regim Dinamic.doc
Alții au mai descărcat și

Introducere Câteva mii de ani, de la navigatorii fenicieni si pâna în urma cu circa 50 de ani, transporturile de marfa la distante lungi au fost...

1.Scopul si utilitatea sistemului Motoarele pas cu pas se folosesc acolo unde este necesară precizie ridicată (hard disc, copiatoare ,imprimante)....

CAPITOLUL I MASINA SINCRONA 1.1 Descrierea masini sincrone Masina sincrona este tipul de masina electrica rotativa de curent alternativ care...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...

Modulele rotative au posibilitatea de a efectua miscari de rotatie complete continue sau discontinue. Miscarea de rotatie este primita de la un...
Te-ar putea interesa și

Tema proiectului Sa se proiecteze un sistem de actionare cu motor electric pas cu pas pentru mecanismul prezentat in figura 1 Fig.1 Unde MPP -...