Extras din proiect
1. Prezentare
Sarcina portanta maxima [kg] 60
Intindere [m] 2.05
Repetabilitate [mm] 0.06
Greutatea robotului [kg] 425
Inaltimea robotului [mm] 1727
Miscarea axelor
Axele Spatiul de lucru [°] Viteza maxima a axei [°/s]
Axa 1 Intre +180 si -180 175
Axa 2 Intre +150 si -150 175
Axa 3 Intre +75 si -180 175
Axa 4 Intre +400 si -400 250
Axa 5 Intre +120 si -125 250
Axa 6 Intre +400 si -400 360
Robotul este folosit pentru aplicatii de : asamblare, sudare, manipulare, taiere cu
laser, impachetare, spalare/curatare.
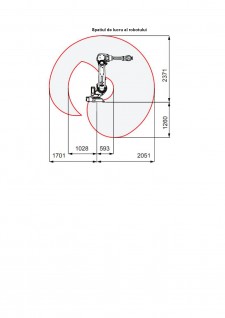
Spatiul de lucru al robotului
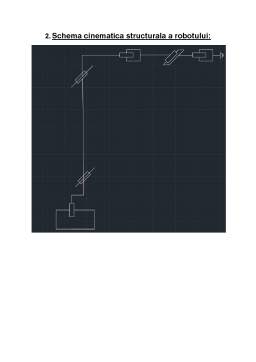
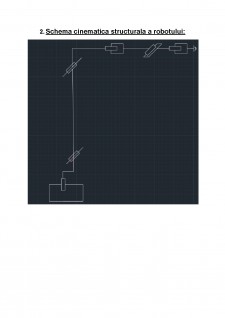
2. Schema cinematica structurala a robotului:
3. Schema cinematica structurala a robotului cu sistemele
de coordinate :
Pentru o mai buna intelege se va desparti sistemul de orientare fata de
sistemul de pozitionare in 2 imagini diferite si se va explica cum s-a facut
trecerea de la un sistem de axe la altul, de la cupla la cupla.
Reguli principale de trecere de la un sistem la altul:
1) In jurul axei Z mereu se realizeaza miscarea de rotatie
2) Axa x este prelungirea perpendicularei commune dintre Z si Z-ul noului
sistem de axe
3) Axa y mereu se determina cu ajutorul regulei mainii drepte.
4) Semnul unghiului din urma rotatiei de la un sistem la altul se determina
prin privirea din varful axeiin jurul careia s-a efectuat rotatia catre origine,
daca se roteste in sens trigonometric este cu - daca se roteste in sensul
acelor ceasului este cu +
Preview document









Conținut arhivă zip
- Proiect BCRI.pdf