
Cuprins
- I. Schema hidraulică de acţionare
- I.1. Elaborarea schemei hidraulice
- I.2. Funcţionarea instalaţiei
- II. Calculul performanţelor şi alegerea motoarelor hidraulice liniare
- II.1. Soluţii constructiv-funcţionale
- II.2. Parametrii tehnico-funcţionali
- II.3. Relaţii de calcul şi proiectare. Alegerea cilindrului
- III. Calculul şi dimensionarea conductelor rigide şi flexibile
- III.1. Elemente generale de calcul hidraulic şi mecanic
- III.2. Calculul de dimensionare al conductelor. Alegerea conductelor
- IV. Calculul, dimensionarea şi alegerea aparaturii de distribuţie, reglare şi auxiliar
- IV.1. Soluţii constructiv-funcţionale
- IV.1.1. Distribuitoare hidraulice
- IV.1.2. Supapa de siguranţă
- IV.1.3. Supape de sens
- IV.1.4. Regulator de debit
- IV.2. Lichidul de lucru
- IV.3. Calculul performanţelor şi alegerea filtrelor
- V. Calculul circuitului hidraulic
- V.1. Pierderi energetice
- V.2. Calculul pierderilor de presiune
- VI. Calculul performanţelor şi alegerea pompei volumice
- VI.1. Soluţii constructiv-funcţionale
- VI.2. Parametrii tehnico-funcţionali
- VI.3. Relaţii de calcul şi alegerea pompei volumice
- VII. Calculul performanţelor şi alegerea rezervorului de ulei
- VII.1. Soluţii constructiv-funcţionale
- VII.2. Parametrii tehnico-funcţionali
- VII.3. Relaţii de calcul şi alegerea rezervorului de ulei
- VIII. Norme de tehnica securităţii muncii
Extras din proiect
I. Schema hidraulică de acţionare
I.1. Elaborarea schemei hidraulice
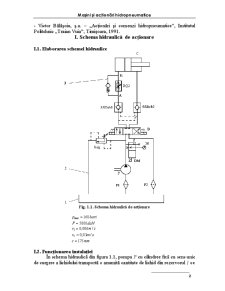
Fig. 1.1. Schema hidraulică de acţionare
I.2. Funcţionarea instalaţiei
În schema hidraulică din figura 1.1, pompa P cu cilindree fixă cu sens unic de curgere a lichidului transportă o anumită cantitate de lichid din rezervorul 1 ce trece prin filtrul F1, la distribuitorul 4/3 D cu comandă prin electromagnet cu simplă acţiune şi revenire cu arc. Surplusul de lichid revine în rezervorul 1 prin intermediul supapei de siguranţă Ssig cu comandă directă, prin conducta 2.
Distribuitorul 4/2 DM cu comandă prin electromagnet cu simplă acţiune şi revenire cu arc face legătura dintre manometrul M şi circuitul principal, împiedicând menţinerea continuă a acestui aparat de măsură sub presiune. Manometrul M măsoară presiunea lichidului în circuitul principal.
Lichidul ce a trecut de distribuitorul D trece prin supapa de sens deblocabilă Ssdeb1, care transmite o comandă (impuls) de deblocare către supapa Ssdeb2, fapt reprezentat cu linie punctată, pentru a permite returul lichidului. După supapa Ssdeb1, lichidul e preluat de un regulator de debit cu două căi RQ2 reglabil prevăzut cu o supapă 3 de sens unic cu arc de revenire.
Cilindrul hidraulic C cu dublă acţiune cu tijă unilaterală preia lichidul şi transformă energia hidraulică de presiune a acestuia în energie mecanică de translaţie (forţă şi viteză), pe care o transmit mecanismelor acţionate.
Lichidul se întoarce prin supapa de sens deblocabilă Ssdeb2 care transmite o comandă (impuls) de deblocare către supapa Ssdeb1, fapt reprezentat cu linie punctată, pentru a permite turul lichidului şi continuitatea mişcării pistonului, prin distribuitorul D şi apoi prin filtrul F2, ajungând în rezervorul 1.
II. Calculul performanţelor şi alegerea motoarelor
hidraulice liniare
II.1. Soluţii constructiv-funcţionale
Motoarele hidraulice liniare sub denumirea curentă de cilindrii hidraulici transformă energia hidraulică de presiune în energie mecanică de translaţie (forţă şi viteză), pe care o transmit mecanismelor acţionate. Având în vedere diversitatea condiţiilor impuse de mecanismele acţionate ca răspuns la aceasta cilindrii hidraulici se găsesc într-o gamă largă de variante constructiv - funcţionale.
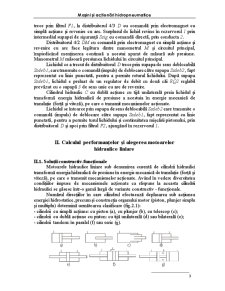
Numărul direcţiilor în care cilindrul efectuează deplasarea sub acţiunea energiei hidrostatice, precum şi construcţia organului motor (piston, plunjer simplu şi multiplu) determină următoarea clasificare (fig.2.1):
- cilindrii cu simplă acţiune: cu piston (a), cu plunjer (b), cu telescop (c);
- cilindrii cu dublă acţiune cu piston: cu tijă unilaterală (d) sau bilaterală (e);
- cilindrii tandem: în paralel (f) sau serie (g).
a) b) c) d)
e) f) g)
Fig. 2.1. Tipuri de cilindrii hidraulici
Cilindrii cu piston, pe departe cel mai utilizat tip de cilindrii hidraulici, realizează nivelul presiunilor de lucru, gabaritul şi tehnologia de fabricaţie.
Soluţii şi recomandări de utilizare a cilindrilor hidraulici
a) Alimentarea unui cilindru individual poate fi făcută: printr-un distribuitor cu două poziţii (1), când sistemul nu poate fi staţionat decât la unul din capetele de cursă (fig.2.2.a); printr-un distribuitor cu trei poziţii (2) cu blocare în poziţie neutră (fig.2.2.b); printr-un distribuitor cu trei poziţii cu blocare în poziţie neutră şi supape anti-şoc (3) (fig.2.2.c) şi supapă de sens anticavitaţională (4) printr-un distribuitor cu trei poziţii şi o poziţie de zero flotantă, pentru deplasare liberă sub acţiunea forţelor exterioare (fig. 2.2.d); prin distribuitor cu patru poziţii (6) şi recirculare a lichidului dinspre o cameră spre cealaltă (fig.2.2.e); cu ajutorul unor supape de sens (8) pilotate în mod convenabil distribuitorul cu trei poziţii de lucru (7) (fig.2.2.f).
Fig. 2.2. Alimentarea unui cilindru individual
b) Alimentarea unui multiplu de cilindrii de o singură pompă se poate realiza: pe rând (individual) cu ieşire blocată la poziţia cuplată (fig.2.3.a); simultan în paralel (sau pe rând) când comandarea simultană a două sau mai multe distribuitoare permite alimentarea simultană a cilindrilor respectivi (fig.2.3.b); simultan în serie (sau pe rând) (fig.2.3.c).
Fig. 2.3. Alimentarea unui multiplu de cilindrii de o singură pompă
II.2. Parametrii tehnico-funcţionali
Parametrii tehnico-funcţionali impuşi prin tema de proiectare sunt:
a) Parametrii tehnico-funcţionali de ieşire:
- Fa[daN] - forţa nominală de tijă;
- C[mm] - cursa (spaţiul) de deplasare al pistonului;
- vp[m/s] - viteza de deplasare;
- ap[m/s] - acceleraţia de deplasare;
- tc[s] - timpul de realizare al cursei C;
- Nm[kW] - puterea mecanică produsă;
Preview document






















Conținut arhivă zip
- Masini si Actionari Hidropneumatice.doc
Alții au mai descărcat și

CAP. I ARGUMENT Hidraulica este stiinta care studiaza legile de echilibru si de miscare a fluidelor din punct de vedere al aplicatiilor in...

Tema proiectului Sa se proiecteze o un reductor de turatie cu o treapta cu roti cilindrice cu dintii inclinati care intra in componenta unei...

I. Sisteme hidraulice de transmitere a miscarii Sistemele hidraulice de transmitere a miscarii constituie o interfata intre o masina forte (MF) si...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...

AVP – montare pe retur si pe tur, setare reglabila AVP- F – montare pe retur si pe tur, setare fixa Descriere Acest dispozitiv este un regulator...