Cuprins
- Capitolul 1. Date inițiale ... 3
- Capitolul 1.1. Introducerea datelor inițiale . 4
- Capitolul 2. Determinarea dimensiunilor principale ale mecanismului ... 5
- Capitolul 2.1. Stabilirea cursei cilindrului hidraulic care echipează balansierul 5
- Capitolul 2.2. Determinarea pozițiilor unghiulare ale cupei .. 7
- Capitolul 2.3. Determinarea dimensiunilor mecanismului patrulater . 9
- Capitolul 3. Determinarea dimensiunilor cilindrului balansierului. ... 13
- Capitolul 4. Determinarea dimensiunilor principale ale standului . 17
- Capitolul 4. 1. Determinarea dimensiunilor cilindrului standului 19
- Capitolul 5. Alegerea pompei hidraulice și a motorului electric de antrenare. .. 21
- Capitolul 5.1. Alegerea pompei hidraulice de alimentare 21
- Capitolul 5.2. Alegerea motorului electric ... 21
- Capitolul 6. Determinarea pozițiilor, vitezelor și accelerațiilor în cazul unui mecanism compus dintr-un cilindru hidraulic și o manivelă .. 22
- Capitolul 6.1. Determinarea pozițiilor . 22
- Capitolul 6.2. Determinarea vitezelor .. 24
- Capitolul 7. Analiza mecanismului patrulater. Calculul pozițiilor si vitezelor .. 25
- Capitolul 7.1. Calculul pozițiilor .. 25
- Capitolul 7.2. Calculul vitezelor mecanismului patrulater ... 27
- Capitolul 8. Determinarea vitezelor din cupă . 28
Extras din proiect
Capitolul 1. Date inițiale
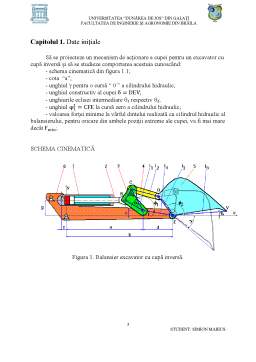
Să se proiecteze un mecanism de acționare a cupei pentru un excavator cu cupă inversă și să se studieze comportarea acestuia cunoscând:
- schema cinematică din figura 1.1;
- cota “a”;
- unghiul pentru o cursă “ 0 ” a cilindrului hidraulic;
- unghiul constructiv al cupei δ=DEV;
- unghiurile eclisei intermediare - 1 respectiv - 2;
- unghiul φ11=CFE la cursă zero a cilindrului hidraulic;
- valoarea forței minime la vârful dintelui realizată cu cilindrul hidraulic al balansierului, pentru oricare din ambele poziții extreme ale cupei, va fi mai mare decât Fmin;
SCHEMA CINEMATICĂ
Figura 1. Balansier excavator cu cupă inversă.
Capitolul 1.1. Introducerea datelor inițiale
S-au folosit notațiile:
Ng - numărul grupei din care face parte studentul;
n - numărul curent al studentului în grupă;
A - coeficient care va fi indicat de cadrul didactic.
Unghiul maxim de rotire al cupei este de 130.
Se adoptă:
A = 16;
Ng = 5631;
n = 17;
a=Ng2+(−1)n⋅n⋅A [mm] (1);
a=56312+(−1)17⋅17⋅16 = 2543.5 mm (1.1);
γ0=(1+n⋅0.3) [grade sexa] (2);
γ0=(1+17⋅0.3) = 6.1 (2.1);
δ=(100−n⋅0.1) [grade sexa] (3);
δ=(100−17⋅0.1) = 98.3 (3.1);
- 1= 80; - 2= 15; (4);
φ11=120+(−1)n⋅n⋅0.1 [grade sexa] (5);
φ11=120+(−1)17⋅17⋅0.1 = 118.3 (5.1);
Fmin=50000+(−1)n∙n∙1250 [N] (6);
Fmin=50000+(−1)17∙17∙1250 = 28750 N (6.1);
L1=(0.27 0.33)∙a [mm] (7);
L1=(0.27 0.33)∙2543.5 = 686.745 ... 839.355 mm (7.1);
L5=(0.5 0.55)∙a [mm] (8);
L5=(0.5 0.55)∙2543.5 = 1271.75 ... 1398.925 mm (8.1);
Preview document





























Conținut arhivă zip
- Proiectarea unui mecanism de actionare a cupei pentru un excavator cu cupa inversa.pdf
Alții au mai descărcat și

MEMORIU JUSTICATIV În acestă eră a vitezei, a tehnologiei, a cercetărilor, a experimentelor omul și-a extins limitele până la extreme, iar de aici...

1. Introducere Tema proiectului: Să se proiecteze o pompa de injectie automata: - calcule MathCAD - desene CAD (soft la alegere) Datele de...

Cap. 1 Introducere 1.1 Prototiparea virtuală Prototipare virtuală este o ramură a ingineriei care cu ajutorul unui software ne ajuta în simularea...

Sa se proiecteze schema de actionare hidraulica a unui robot industrial cu 5 grade de libertate ,avand capaciatatea de ridicare de 80 kg. Se va...

A. DESCRIEREA PROBLEMEI A.1 Introducere În componența multor produse tehnice se regăsesc elemente cu diferite materiale care au structuri...

Cap. 1Introducere 1.1.Destinația sistemului de direcție Sistemul de direcție deservește la modificarea direcției de deplasare a automobilului,...

1. ASPECTE GENERALE 1.1. DEFINIREA ȘI CLASIFICAREA SISTEMELOR DE ACȚIONARE HIDRAULICĂ Prin sistem de acționare hidraulică se înțelege un ansamblu...

Cap de bara. 1) Descrierea problemei Capetele de bara se compun dintr-o carcasa si o articulatie sferica. Tija capului de bara are filet exterior...