
Cuprins
- Tema de proiectare 1
- Introducere teoretică 1
- 3.1. Proiectarea şurubului principal 10
- 3.2. Proiectarea piesei de reazem 14
- 3.3. Proiectarea şurubului secundar 15
- 3.4. Proiectarea piuliţei fixe 18
- 3.5. Proiectarea suportului 21
- 3.6. Proiectarea sistemului de acţionare 22
- 3.7. Proiectarea roţii de clichet 24
- 3.8. oiectarea clichetului vertical 26
- 3.9. Proiectarea asamblării clichetului 28
- 3.10. Proiectarea suportului pentru clichet 30
- Bibliografie 32
Extras din proiect
1. Tema de proiectare
Să se proiecteze un Sistem Mecanic cu Şuruburi de Mişcare pentru ridicarea unei sarcini axiale F, cu acţionare manuală cu clichet vertical, ce realizează o cursă H şi raportul între înălţimile maximă şi minimă K.
1.1 Variante constructive
- Cric simplu cu şurub
- Cric cu şurub telescopic / cu dublă acţiune
- Cric cu piuliţă rotitoare
- Presă cu şurub
- Menghină cu şurub
1.2 Caracteristici tehnice (date iniţiale de proiectare):
- Sarcina de ridicat: [N]
- Cursa de ridicare: [m]
- Raportul dintre :
2. Generalităţi
Transmisia şurub piuliţă reprezintă o cuplă tribologică filetată (elicoidală) cu mişcare de alunecare între spire, fiind utilizată la transformarea mişcării de rotaţie în translaţie şi transmiterea sarcinilor.
În construcţia de maşini, acest sistem mecanic este frecvent întâlnit datorită următoarelor avantaje:
posibilitatea transmiterii sarcinilor mari ;
asigurarea condiţiei de autofrânare;
funcţionare silenţioasă;
simplitatea construcţiei şi execuţiei;
gabarit redus (compactitate);
preţ de cost scăzut.
Sistemele mecanice cu şurut de mişcare se utilizează în mai multe variante constructive:
1. piuliţă fixă-şurub cu mişcare de rotaţie şi translaţie sRT
Exemple: cricuri, prese cu şurub
2. şurub fix-piuliţă cu mişcare de rotaţie şi translaţie pRT
Exemple: chei speciale de strângere
şurub cu mişcare de rotaţie-piuliţă de translaţie sR-pT
Exemple: crucuri cu pârghii, mecanisemele de avans ale maşinilor unelte, menghine
piuliţă de rotaţie-şurub de translaţie pR-sT
Exemple: cric cu piuliţă rotitoare.
Formele constructive enumerate anterior depind atât de modul de ridicare a sarcinii cât şi de modul de acţionare a acestora.
Principalul dezavantaj al cuplei elicoidale cu alunecare între spire este randamentul scăzut (0,2-0,3), ceea ce justifică utilizarea acesteia mai ales la acţionarea manuală.
2.2 Schema constructivă şi modul de funcţionare
Variantele constructive de cric cu şuruburi (telescopic şi cu dublă acţiune) au în componenţă două cuple elicoidale şurub-piuliţă şi se utilizează în cazurile când înălţimea de ridicare impusă are valori mari.
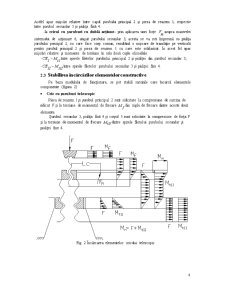
- Cricul telescopic realizează înălţimea de ridicare doar în cupla elicoidală şurub secundar-piuliţă fixă (fig. 1), cea de a doua cuplă elicoidală şurub principal-şurub secundar fiind folosita numai pentru apropierea şurubului principal de sarcină (acest şurub este de reglaj).
1-piesă de reazem
2-şurub principal I
3-şurub secundar II
4-piuliţă fixă
5-sistem de acţionare
Fig. 1 Schema constructivă pentru cricul cu şuruburi telescopic
- Cric cu dubla acţiune
Această variantă constructivă se utilizează în cazurile când este necesară o ridicare rapidă, iar înălţimea şi sarcina de ridicare impuse au valori mici.
La cricul cu dublă acţiune ambele cuple elicoidale participă la realizarea înălţimii de ridicare.
Particularităţi constructive:
a) Cricul cu şurub telescopic:
-piesa de reazem 1 şi capul şurubului principal 2 formează o cuplă cu frecare axială de alunecare sau cu rostogolire (rulment axial);
-cursa de ridicare H este realizată în totalitate de şurubul secundar 3 (II), şurubul principal 2 (I) fiind utilizat numai pentru apropierea piesea de reazem 1 de sarcina de ridicat.
b) Cricul cu şuruburi cu dublă acţiune:
-piesa de reazem 1 este solidarizată de capul şurubului principal 2 având aceleaşi mişcări cu acesta;
-cursa de ridicare este obţinută prin sumarea deplasării de translaţie pe cele două filete.
Datorită acestor diferenţe constructive, modul de funcţionare este puţin diferit, astfel:
-la cricul cu şurub telescopic- prin aplicarea unei forţe asupra manivelei sistemului de acţionare 6, solidar cu şurubul secundar 3, acesta se va roti împreună cu şurubul principal 2, cele două şuruburi I şi II fiind solidarizate în cupla elicoidală (dacă ).
Preview document






























Conținut arhivă zip
- Proiectarea unui Sistem Mecanic cu Suruburi de Miscare Pentru Ridicarea unei Sarcini Axiale F.doc
Alții au mai descărcat și

TEMA PROIECTULUI Sa se proiecteze un cric auto cu parghii pentru o sarcina maxima F=15000 [N] care sa respecte urmatoareleconditii tehnice :...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...
Te-ar putea interesa și

Tema de proiectare Să se proiecteze un mecanism șurub-piliță de tipul “Presa cu o coloana” Date de proiectare: - sarcina maximă de ridicat Q =...

TEMA PROIECTULUI Să se proiecteze un cric cu transmisie prin cuplă elicoidală la care şurubul/piuliţa este rotitor/rotitoare iar piuliţa/şurubul...