
Extras din proiect
Proiectare unui sistem mecatronic de determinare si masurarea a vibratiilor si a transmisiilor prin curele
INTRODUCERE
Dinamica sistemelor mecanice flexibile care rece reducere a vibratiilor care sunt de obicei reprezentate prin ecuatii matematice diferentiale. In special sistemele sfexibile sunt modelate de ecuatiile diferentiale partiale sadisfacute in special intr-un dimeniu si un set de conditii limita. Aceste conditii limita, trebuie sa fie sadisfacute la punctele limita ale domeniului. De obicei ecuatiile partiale diferentiale bazate pe un model pentru sisteme felxibile au fost discretizate prin analiza modelelor pentu a falcilita procesul de control si proiectare. Unul din dezavantajele folosirii unui model discretizat pentru controlul proiectarii este acela ca controlerul poate sa sensibilizeze vibratiile dese sunt neglijate pe perioada procesului de discretizare (evectul de val) si asadar sa destabilizeze sistemul in bucla inchisa. In ultimi ani tehnicile de control distribuite folosind senzori de control si actuatori (structuri inteligente) au devenit populare ; de altfel distributia senzorilala este de cele mai multe ori prea scumpa pentru a implementa sau a neglija. Mai recent controlul limitelor a fost propus pentru a fi folosit in aplicati pentru controlului vibratiilor. Pe de cealalata parte folosind modelul discretizat pentru controlul proiectarii, controlul limita a fost derivat pe un model bazat pe ecuatiile diferentiale partiale si de aceea evita efectul de val periculos. Pe de alta parte distributia senzolrila, controlul tehnic, controlil limitei este aplicat la limitele sistemului flexibil, si ca rezultat are nevoie de putini senzori sau actuatori.
In acest capitol noi introducem cititorului concepul pentru aplicarea controlului limita a sistemelor mecanice. In special in primul rand noi vom furniza un exemplu pentru a ilustra intr-un mod practic cum un controler limita este derivat prin intermediul folosiri “apropieri tip Lyapunov “. La acest capat noi vom examina urmatorul system mecanic flexibil descris de ecuatiile diferentiale partiale
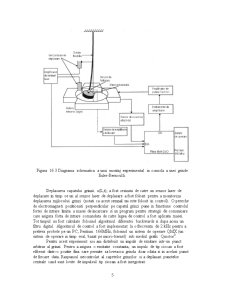
Fig 16:1 Diagrama schematrica a unui sistem sfoara
(16 :1)
impreuna cu conditiile limita.
(16 :2)
Unde {ecuatie}denota variabila independenta a pozitiei, t denota variabila independenta a timpului, {ecuatie} denota variabila independenta a pozitiei x pentru timpul t, subscriptul x,t reprezinta derivativele partiale respectiv cu referire la x,t, si f(t) este un control al intrarii la pozitia limita x=L. Sistemul flexibil descris de ecuatia (16.1) si (16.2) poate fii reprezentata schematic ca si in figura 16.1
Controlul obiectiv implica proiectarea fortei de control f(t) pentru a elimina vibratiile pe tot domeniul sistemului folosind doar masurarile limitei. In special scopul este de a conduce ca si . Filozofia de baza a acestei probleme de control este f(t) ar trebuii sa se comporte ca si un amortizor virutual activ care absoarbe energia afara din sistem. Ar trebuii notat ca gradul de complexitate acestei forte tip amortizor este des in directa legatura cu sistemul model. Pentru modelul linia PDE din 16.1 si 16.2 doar un simplu amortizor sub forma unui raspuns negativ a vitezei limita a termenului la x=L. Este suficient pentru a eliminina vibratiile pe tot domeniul sistemului. De altfel cum va fii aratat in exemplele urmatoare o lege mai sofisticata a controlului limitei este adesea ceruta pentru modelele sistemului flexibile mai complicate.
Pentru a ilustra procedura de proiectare a controlului limita vom considera urmatoare lege de control a limitei pentru sistemul descris in 16.1 si 16.2:
Preview document























Conținut arhivă zip
- Proiectarea unui Sistem Mecatronic de Determinare si Masurare a Vibratiilor.doc
Alții au mai descărcat și

Memoriu justificativ In cadrul fiecarei cercetari desfasurate, indiferent de domeniul la care ne referim, rezultatele obtinute pe cale teoretica...

În condiţiile create se ridică problema efectuării diagnosticării după standartele moderne a autovehiculelor. Autovehiculul - este unul din cele...

Tamburul se executa din fonta cenusie simpla sau aliata(cu molibden,nichel si crom)si uneori, din tabla de otel ambutisata sau combinate,compuse...

Memoriu de prezentare DMC 5-0-MP Ciurul vibrator unidirectional ce constituie obiectul acestui proiect este un utilaj folosit cu preponderenta in...

1. Generalităţi În prezent o parte însemnată a traficului de mărfuri şi de calatori se efectuează pe calea ferată. Dezvoltarea intensă a tehnicii...

Introducere Metoda elementelor finite (MEF) este departe de a fi perfectă, dar este cea mai bună dintre metodele disponibile în prezent pentru o...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...

1.1. Consideratii teoretice Determinarea experimentală a amortizării din sistemele mecanice se poate realiza: a) analizând vibraţiile libere ale...
Te-ar putea interesa și

1.1 SISTEME OSCILANTE Un corp aflat în stare de echilibru îşi menţine această stare un timp nedefinit, dacă asupra lui nu intervin acţiuni...