Cuprins
- CUPRINS
- CAPITOLUL 1 2
- SCHEMA CINEMATICA A ROBOTULUI ÎN STRUCTURA R.T.T. 2
- 1.1. CONSIDERATII GENERALE ASUPRA ROBOTILOR INDUSTRIALI 2
- CAPITOLUL 2 4
- ALEGEREA SISTEMULUI DE ACTIONARE OPTIM A MODULUI DE PIVOTARE 4
- 2.1. SUBANSAMBLURI PENTRU REALIZAREA ROTATIEI PRINCIPALE ÎN JURUL AXEI VERTICALE OZ. 4
- CAPITOLUL 3 6
- PROIECTAREA SISTEMELOR DE ACTIONARE 6
- 3.1. ALEGEREA MOTORULUI ELECTRIC 6
- 3.1.1. Determinarea puterii necesare la arborele motor 6
- 3.1.2. Determinarea randamentului transmisiei 6
- 3.1.3. Determinarea turatiei necesare la arborele motor 7
- 3.1.4. Alegerea motorului electric 7
- CAPITOLUL 4 9
- ALEGEREA SI CALCULUL TRANSMISIEI PRIN CURELE DINTATE SINCRONE 9
- 4.1. PUTEREA TRANSMISA PRIN CUREAUA DINTATA 9
- 4.2. ALEGEREA MARIMII CURELEI SI A PASULUI DANTURII 10
- 4.3. ALEGEREA DIAMETRELOR ROTILOR SI A NUMARULUI DE DINTI 10
- 4.4. ALEGEREA LATIMII CURELEI 10
- 4.5. CALCULUL DISTANTEI DINTRE AXE 11
- CAPITOLUL 5 12
- CALCULUL ANGRENAJULUI ARMONIC 12
- 5.1. STABILIREA NUMARULUI DE DINTI 12
- 5.2. CALCULUL MODULULUI DANTURII 12
- 5.2.1. Calculul momentului de torsiune transmis de elementul flexibil 13
- 5.3.CALCULUL GEOMETRIEI ANGRENAJULUI ARMONIC 13
- 5.3.1. Calculul unghiului profilului 13
- 5.3.2. Deformarea specifica a elementului elastic 13
- 5.3.3. Grosimea specifica a peretelui elementului flexibil 14
- 5.3.4. Grosimea elementului flexibil 14
- 5.3.5. Deplasarea specifica a profilului elementului flexibil 14
- 5.3.6. Modulul conventional pe circumferinta neutra a elementului flexibil 14
- 5.3.7. Deplasarea specifica a profilului elementului rigid 14
- 5.3.8. Diametrele cercurilor de divizare 15
- 5.3.9. Diametrele cercurilor de vârf 15
- 5.3.10. Înaltimea dintelui 15
- 5.3.11. Diametrele cercurilor de picior 15
- 5.3.12. Latimea danturii 16
- 5.3.13. Stabilirea elementelor geometrice ale elementului flexibil 16
- 5.3.14. Calcululdimensiunilor generatorului 17
- 5.3.15. Calculul dornului de prelucrare 17
- CAPITOLUL 6 19
- VERIFICAREA ANGRENAJULUI ARMONIC 19
- 6.1. VERIFICAREA ELEMENTULUI FLEXIBIL LA SOLICITARI VARIABILE 19
- 6.2. VERIFICAREA LA STABILITATE A ELEMENTULUI FLEXIBIL 21
- 6.3. CALCULUL RANDAMENTULUI ANGRENAJULUI ARMONIC 22
- CAPITOLUL 7 23
- DIMENSIONAREA ARBORELUI REDUCTOR SI STABILIREA DIMENSIUNILOR CONSTRUCTIVE ALE CARCASEI 23
- 7.1. PREDIMENSIONAREA ARBORELUI 23
- 7.2. ALEGEREA SI VERIFICAREA PENELOR 25
- CAPITOLUL 8 28
- DETERMINAREA DIMENSIUNILOR ASAMBLARII PRIN CANELURI A DEFORMATORULUI CU ARBORELE REDUCTORULUI ARMONIC 28
- 8.1. DETERMINAREA ELEMENTELOR GEOMETRICE 28
- 8.2. SUPRAFATA PORTANTA NECESARA 29
- 8.3. SUPRAFATA PORTANTA REALA RAPORTATA LA UNITATEA DE LUNGIME 30
- 8.4. LUNGIMEA NECESARA A BUTUCULUI 30
- 8.5. MOMENTUL DE TORSIUNE CAPABIL 30
- 8.6. EFORTUL UNITAR DE ÎNCOVOIERE 30
- CAPITOLUL 9 31
- ALEGEREA RULMENTILOR 31
- CAPITOLUL 10 34
- VERIFICAREA LA ÎNCALZIRE A REDUCTORULUI 34
- 10.1. CALCULUL CAPACITATII DINAMICE 35
- BIBLIOGRAFIE 36
Extras din proiect
TEMA DE PROIECT
Sa se proiecteze mecanismul de realizare a miscarii de rotatie dupa axa Oz din cadrul subansamblului cinematic principal ce constituie parte componenta a structurii mecanice a unui robot industrial.
DATE DE PROIECTARE
- durata de functionare: t=18000 ore;
- Puterea la iesire: =1,5 kW;
- Turatia la iesire: =12 rot/min.
CAPITOLUL 1
SCHEMA CINEMATICA A ROBOTULUI ÎN STRUCTURA R.T.T.
1.1. CONSIDERATII GENERALE ASUPRA ROBOTILOR INDUSTRIALI
Robotul este un produs mecatronic, combinând tehnologia mecanica cu cea electronica, iar robotizarea industriei este etapa care a urmat firesc mecanizarii si automatizarii.
Robotul este o componenta evoluata de automatizare, care combina electronica de tip calculator, cu sisteme avansate de actionare mecanica, pentru arealiza un echipament independent, de mare flexibilitate.
Robotul industrial este un manipulator automat cu miscari programabile, multifunctional, având câteva grade de mobilitate (libertate) si capabil sa efectuieze operatii de manipulare a materialelor, pieselor instrumentelor sau dispozitivelor tehnologice speciale, prin programarea variabilaa miscarilor, pentru realizarea unei varietati de functii.
Clasificarea robotilor industriali, în functie de complexitatea functiunilor pe care le pot realiza:
- manipulatoare simple, cu secvete de lucru limitate la operatii succesive necomplexe având 2-3 grade de libertate; posibilitatile si flexibilitatea sistemului de comanda (limitatoare de cursa, dispozitive cu came, automate programabile si altele similare) sunt limitate;
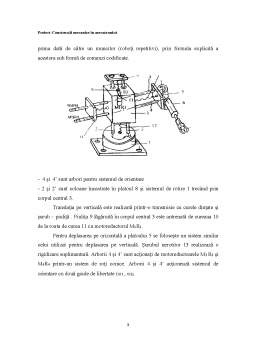
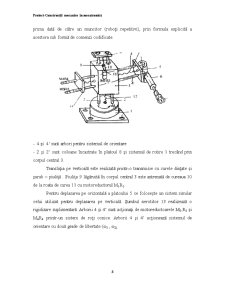
- manipulatoare programabile sau roboti industriali în sensul adevarat al cuvântului, ce dispun de 5-6 grade de libertate, comandate de sisteme de comanda ce dispun de capacitatea de amemora intern programe de efectuare a unor miscari, atât simple cât si compuse, de regula însusite în timpul efectuarii acestora pentru prima data de catre un muncitor (roboti repetitivi), prin formula explicita a acestora sub forma de comenzi codificate.
Preview document




































Conținut arhivă zip
- Reductor Armonic.doc
Alții au mai descărcat și

Cutia de viteze face parte din transmisia automobilului având princi¬palul rol de modificare a momentului primit de la motor în functie de variatia...

Cap 1. Analiza constructiv functionala a principalelor tipuri de rezervoare atmosferice utilizate la depozitarea produselor petroliere. Industria...

Intretinerea urmareste sa mentina masinile, utilajele si instalatiile in conditii normale de exploatare intre doua reparatii consecutive, reducand...

TEMA PROIECTULUI: Sa se realizeze tehnologia de prelucrare a piesei Flansa ovala , avându-se în vedere un lot de 500 de bucati. CAPITOLUL 1....

1. Memoriu de prezentare 1.1. Descrierea generala a podului rulant multioperational din punct de vedere constructiv si functional Podul rulant...

PROBLEMATICA GENERALA A ROBOTILOR INDUSTRIALI Robotica reprezinta un vast domeniu interdisciplinar, care cuprinde, atât din punct de vedere...

Consideratii generale Transmisiile mecanice dintre motor si masina electrica de lucru maresc sau micsoreaza viteza, respectiv momentul transmis;...

Sa se proiecteze procesul tehnologic de fabricatie (pentru o productie de 10000 bucati pe an ) si reconditionare (pentru o productie de 1000 de...
Te-ar putea interesa și

MEMORIUL TEHNIC DE CALCUL (Facultatea I.M.S.T., specializarea Inginerie Economică) Breviarul de calcul va conţine următoarele capitole: 1....


INTRODUCERE Tendinţa actualei etape de dezvoltare şi modernizare a industriei constructoare de maşini o constituie crearea de maşini, agregate şi...

TEMA PROIECT: Sa se proiecteze mecanismul de realizare a miscarii de rotatie dupa axa OZ din cadrul subansamblului cinematic principal ce...

TEMA PROIECTULUI Sa se proiecteze mecanismul de relizare a miscarii de rotatie dupa axa z din cadrul subansamblului cinematic principal si...

4.1Introducere ELEMENTE CONSTRUCTIVE SI DE CALCUL ALE ROBOŢILOR INDUSTRIALI Construcţia RI trebuie sa răspundă cerinţelor funcţionale de...

Tema de proiect Sa se proiecteze structura mecanica a masinii de masurat in plan, in coordonate, din figura de mai jos, compusa din doua module...

Capitolul 1. Alegerea motorului electric de angrenare Motorul ales 2MMIR71 - conform 1 Capitolul 2. Calculul cuplajului de tip Forst Unghiul...