Cuprins
- I. Date initiale:
- 1) Domeniu de reglare:
- 2) Motor hidraulic cu pistoane axiale si disc inclinat
- 3) Momentul de inertie al sarcinii:
- 4) Presiunea de alimentare:
- 5) Servovalva cu 2 etaje de amplificare
- II. Continutul proiectului:
- 1) Consideratii generale privind constructia si functionarea motoarelor hidraulice cu pistoane axiale si bloc inclinat.
- 2) Alegerea schemei de principiu a sistemului si a elementelor de baza.
- 3) Alegerea servovalvei electrohidraulice si a regulatorului electric de viteza
- 4) Modelarea matematica a elementelor de putere si comanda
- 5) Simularea numerica a sistemului de actionare si verificarea performantelor.
- 6) Concluzii
Extras din proiect
Tema Proiectului
Proiectarea unui sistem electrohidraulic de reglare a vitezei de rotatie folosind ca element de comanda a energiei o servovalva cu reactie de forta.
Consideratii generale.
Inainte de a se trece la proiectarea propriuzisa, apreciem ca este necesara o prezentare de ansamblu a unor concepte si elemente ce compun un sistem electrohidraulic, alcatuirea acestor elemente, principiile de functionare, sfera de aplicabilitate, diversitatea tipurilor si pe baza unei analize atente in functie de scopul urmarit sa se faca alegerea propriuzisa a sistemului ce urmeaza a fi proiectat.
Este cunoscut faptul ca in tehnica reglarii automate, sistemele de pozitionare au reprezentat primele aplicatii deoarece atat deplasarea liniara cat si cea rotativa se regasesc pe scara larga la masinile si instalatiile tehnologice.
Insasi denumirea de servomecanism este legata de sistemele de comanda a deplasarilor mecanice a unor elemente cinematice ale masinilor tehnologice.
Desi un servomecanism este un sitem automat care realizeaza o dependenta prestabilita intre o marime de iesire ( deplasare mecanica ) si o marime de intrare ( de comanda ) fie de un operator uman, fie de catre un sistem de conducere in cadrul unei structuri ierarhizate.
Servomecanismele sunt subsisteme esentiale pentru comanda proceselor in general si a instalatiilor tehnice in special. Ca o concluzie, se poate spune ca indiferent de domeniul de aplicare, servomecanismele sunt sisteme de reglare a pozitiei si au o structura si o functionalitate subordinate acestui scop.
Din punct de vedere constructiv sunt servomecanisme electromecanice, mecanohidraulice si electrohidraulice, iar asupra acestora vom insista mai mult.
Dupa modul de prelucrare a semnalelor de reglare servomecanismele sunt analogice si numerice. Daca servomecanismele analogice se caracterizeaza printr-o comportare analogica atat a elementelor componente cat si a obiectului pozitionat, servomecanismele numerice contin un subsistem de prelucrare a informatiilor si de elaborare a deciziei, in timp ce subsistemul de actionare pastreaza in continuare un caracter analogic.Acestea din urma au performante superioare fata de cele analogice si in primul rand o precizie ridicata, o fiabilitate mai buna si o compatibilitate directa cu tehnica de calcul.
Exista si o alta categorie de servomecanisme reprezentata de sistemele de reglare incrementala a pozitiei, care transforma informatia discreta sub forma de impulsuri, intr-o deplasare discontinua incrementala a pozitiei. Elementele de actionare incrementala sunt realizate sub forma motoarelor pas cu pas, electrice, electromecanice sau electrohidraulice. Si unele si altele au o serie de avantaje si dezavantaje, alegerea lor facandu-se in functie de scopul urmarit.
Trebuie subliniat faptul ca servomecanismul electrohidraulic realizeaza reglarea precisa a pozitiei folosind pentru transmiterea puterii un fluid sub presiune.
Din punct de vedere structural, servomecanismele electrohidraulice contin doua subsisteme de baza; unul hidraulic de actionare propriuzisa si altul electronic de comanda. Particularitatile acestor sisteme sunt determinate atat de utilizarea fluidelor ca mediu de transmitere a puterii, cat si de necesitatea unui echipament de interfata plasat intre cele doua subsisteme.
Fluidul hidraulic indeplineste o serie de functii importante in cadrul sistemului si de aceea pentru alegerea corecta si utilizarea corespunzatoare a fluidului de lucru se acorda o atentie sporita, dearece de acesta depinde fiabilitatea si durata de viata a intregului sistem.
O importanta deosebita in utilizare o prezinta proprietatile generale si speciale, chimice si termodinamice pe care trebuie sa le indeplineasca fluidul, iar dintre acestea vascozitatea si compresibilitatea determina in mod direct stabilitatea si performantele dinamice ale servomecanismelor.
De aceea, alegerea fluidului de lucru reprezinta o etapa preliminara importanta in proiectarea unui servomecanism in care trebuie analizate atat conditiile de functionare ale sistemului, cat si proprietatile fluidului si in special domeniul admisibil de temperatura in care acesta isi conserva calitatile cerute.
Importante de retinut sunt cele doua moduri fundamentale decomanda a energiei hidraulice care stau la baza constructiei servomecanismelor electrohidraulice, deoarece servomecanismele utilizeaza subsisteme cu amplificator de comanda ( comanda rezistiva ) si subsisteme cu pompa reglabila ( comanda volumica.).
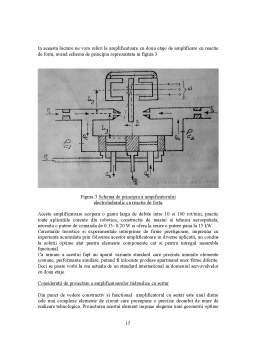
Astfel sistemele cu amplificator hidraulic de comanda sunt utilizate in domeniul puterilor mici, sub 10 Kw, unde ofera o comportare dinamica foarte rapida si cel mai avantajos raport putere – greutate, desi au un randament energetic redus ( cel mult 67 % ). Aceste sisteme sunt alimentate de la surse de presiune constanta care utilizeaza pompe cu debit constant si pot furniza la iesire o deplasare liniara, unghiulara sau oscilanta a obiectului actionat.
Subsistemele cu pompa reglabila permit o comanda volumica a energiei hidraulice prin reglarea sebitului furnizat de pompa in directa concordanta cu necesitatile sarcinii actionate. Aceste subsisteme au un randament energetic ridicat ( peste 94 % ) si sunt utilizate in domeniul actionarilor de putere mare, 10 Kw.
Pentru reglarea debitului, pompele volumice cu debit variabil, cu disc inclinat sau cu bloc inclinat necesita un sistem propriu de actionare prevazut cu un amplificator de comanda, ceea ce mareste complexitatea sistemului si implicit costul acestuia.
O categorie speciala de sisteme hidraulice de actionare o formeaza cele care realizeaza o reglare volumica atat la pompa cat si la motorul hidraulic. Aceasta reprezinta transmisia hidraulica in circuit deschis. Aceasta denumire provine de la faptul ca fluidul de lucru circula intre pompa si motor trecand dupa fiecare ciclu prin rezervor. Comanda combinata pe motor si pompa poate fi realizata si in circuit hidraulic inchis.
Deci indiferent de structura si categoria servomecanismelor hidraulice utilizate pentru comanda energiei trebuie actionat un amplificator cu sertar, cu ajutorul caruia se moduleaza debitul si presiunea furnizate de o sursa locala catre un element de executie hidraulic, motor cu miscare de translatie.
Utilizarea echipamentelor electrice pentru comanda sertarului implica necesitatea unui convertor electromecanic care sa transforme un semnal electric intr-o deplasare liniara.
In general servomecanismele electrohidraulice sunt utilizate pentru deplasari liniare sau unghiulare si pot functiona atat in regim de reglare a pozitiei, cat si in regim de urmarire. In ambele cazuri se folosesc motoare hidraulice liniare sau rotative impreuna cu diverse tipuri de convertoare de miscare sau reductoare care permit adaptarea caracteristicilor mecanice ale motoarelor la caracteristicile si cerintele obiectelor actionate ( sarcina mecanica ).
Echipamentul de interfata este realizat sub forma unui amplificator electrohidraulic cu doua sau trei etaje de amplificare care indeplineste si functia de amplificare de putere.
Regulatorul electronic poate fi realizat cu elemente analogice sau numerice, acesta elaborand o comanda in curent a amplificatorului electrohidraulic.
Pentru masurarea pozitiei sau a deplasarilor se utilizeaza diferite tipuri de traductoare de deplasare. De mentionat ca pozitionarea liniara poate fi realizata si cu motoare hidraulice rotative, folosind mecanisme de conversie a miscarii de tip surub – piulita, pinion – cremaliera sau melc – roata melcata.
Preview document



























Conținut arhivă zip
- Sistem Hidraulic de Reglare a Vitezei de Rotatie Folosind ca Element de Comanda a Energiei o Servovalva cu Reactie de Forta.doc
Alții au mai descărcat și

CAPITOLUL 1 ECHIPAMENTUL DE REGLARE A PRESIUNII Elementele echipamentului de reglare a presiunii poartă denumirea de supape, valve sau ventile....

Argument Pentru îmbunătăţirea propriei activităţi pe care am depus-o în anii de studiu şi pentru a atinge standardele curriculare prevăzute pentru...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...

Actionarile hidraulice au ca avantaje: -masa relativ redusa raportata la unitatea de putere; -realizarea miscarii de lucru cu viteza constanta;...
Te-ar putea interesa și

1.Consideraţii generale privind construcţia si funcţionarea motoarelor hidraulice cu pistoane axiale si bloc înclinat. Motoarele hidraulice se...

Capitol introductiv 1.1. Generalităţi asupra sistemelor de acţionare hidraulice şi pneumatice Acţionările hidraulică şi pneumatică reprezintă...