Extras din proiect
Constructia unui robot este caracterizata prin:
• Structura sistematica care este compusa dintr-un grup de sisteme si dispozitive care formeaza cuple cinematice conducatoare. Structura sistemica prezinta avantajul ca furnizeaza informatiile necesare pentru analiza cinematica si dinamica a sistemelor de actionare si mecanic ale robotului. Ea prezinta dezavantajul, ca nu reflecta decat partial functiile sistemelor de rang inferior robotului si particularitatile constructive ale acestora.
• Structura functional-constructiva sau structura modulara este cu dispozitive de ghidare cu topologie seriala pentru a evidentia proprietatile functionale si constructive ale robotilor (modul de robot).
Modul al unui robot, este un subansamblu care este corelat cu una sau mai multe cuple cinematice ale dispozitivului de ghidare si cu efectorul final.
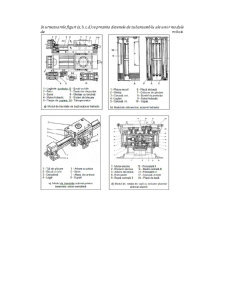
Modulul de robot corelat cu cupla cinematica conducatoare are partile “fixe” ale sistemului de actionare aferent cuplei cinematice conducatoare si traductoarelor / senzorilor, solidarizate cu structura de rezistenta a unuia dintre elemente (i sau i+1). Legatura dintre doua module vecine se realizeaza prin intermediul structurii de rezistenta a elementului i. In acest mod, intregul robot cu dispozitivul de ghidare in topologie seriala este de fapt constituit din “legarea in serie” a unui numar de module.
Modulul de robot corelat cu o singura cupla cinematica poarta o denumire care este definita dupa functia lui in cadrul robotului.
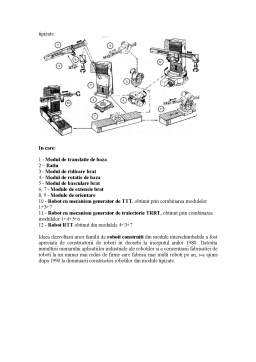
Astfel, exista module de:
- translatii de baza;
- de pivotare de baza;
- de ridicare a bratului;
- de basculare a bratului;
- de extensie a bratului;
- de pronatie – supinatie;
- de flexie – extensie;
- de aductie - abductie.
Ele sunt reprezentabile schematic dupa normele ISO .
Modulul de orientare al unui robot se coreleaza cu toate cuplele cinematice ale mecanismului de orientare, continand de atatea ori componentele enumerate pentru modulul corelat cu o singura cupla cinematica conducatoare, cate cuple cinematice conducatoare are mecanismul de orientare.
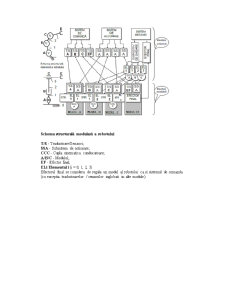
In figura de mai jos se prezinta corelatia dintre structura sistemica si cea modulara (functional - constructiva) a unui robot avand un dispozitiv de ghidare serial cu M = 3.
Schema structurală modulară a robotului
T/S - Traductoare/Senzori;
SSA - Subsistem de actionare;
CCC - Cupla cinematica conducatoare;
A/B/C - Modulul;
EF - Efector final;
ELi Elementul i (i = 0, 1, 2, 3)
Efectorul final se considera de regula un modul al robotului ca si sistemul de comanda (cu exceptia traductoarelor / senzorilor inglobati in alte module).
Preview document










Conținut arhivă zip
- Sistemul de Transmisie la Roboti.doc
Alții au mai descărcat și

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...
Te-ar putea interesa și

1.Generalitati. Incercarile de obtinere a unor noi materiale superperformante au condus la dezvoltarea unei clase de produsi cunoscuti sub...

Introducere În zilele noastre, dezvoltarea activă a științei și tehnologiei, dispozitivele electronice penetrează din ce în ce mai mult viețile...

1. Introducere Denumirea ROBOT a fost introdusă de către scriitorul ceh Karl Capek în lucrarea sa ,,Roboţii universali ai lui Rossum”,(1921),...

1.Introducere Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

GENERALITĂŢI 1 MATERIALE CU MEMORIA FOMEI 2 MATERIALE INTELIGENTE 3 Materiale inteligente – DEFINITII, CONCEPTE 3 Materiale inteligente -...

TEMA DE PROIECT Sa se proiecteze mecanismul de realizare a miscarii de rotatie dupa axa Oz din cadrul subansamblului cinematic principal ce...

TEMA PROIECTULUI Sa se proiecteze mecanismul de relizare a miscarii de rotatie dupa axa z din cadrul subansamblului cinematic principal si...