
Extras din proiect
Subsistemele logistice ale unor sisteme de fabricatie moderne utilizeaza, pentru manipularea si transportul materialelor, pieselor, semifabricatelor si produselor finite, diverse structuri robotice : brate manipulatoare, vehicule ghidate automat (numite si platforme mobile sau carucioare de transport) si chiar structuri pasitoare în locul sistemelor traditionale de transport si manipulatoare manuale. În acest fel creste sensibil flexibilitatea si productivitatea sistemelor de fabricatie în care operatiile de deservire, paletizare, depaletizare etc. ocupa un volum mare de activitate . Vehiculele ghidate automat (AGVs) ajuta la reducerea costurilor de productie si creste eficenta intr-un sitem de productie. AGVs pot sa remorcheze obiecte in spatele lor in containere mici pe care pot sa le ia automat. Aceste containere pot fi folosite pentru a muta materialele direct pe linia de productie. AGV pot sa si depoziteze .. Anumite AGVs foloesesc o furca pentru a ridica obiectele pentru depozitare. Se pot folosi si la transportarea medicamentelor intr-un spital
Primele cercetari asupra unor vehicule ghidate automat (roboti mobil) au fost realizate în S.U.A, în jurul anilor 1975. Desi a trecut o perioada destul de îndelungata de la primele cercetari, totusi, la ora actuala, se constata înca o lipsa de informatii coerente despre solutiile adoptate de diverse firme constructoare si despre performantele diverselor solutii. Cercetarile actuale, în domeniu, sunt îndreptate spre proiectarea si testarea unor solutii constructiv-functionale noi, spre proiectarea si realizarea unor componente electronice si electrice noi precum si spre problema navigarii propriu-zise, în vederea urmaririi optime a unor traiectorii impuse de scena de operare a sistemului de fabricatie respectiv.
Arhitecturile prezentate în literature de specialitate sunt destul de variate, motricitatea fiind asigurata prin intermediul unor roti motoare, actionate individual, de preferinta cu motoare de curent continuu sau pas cu pas electrice. În aceasta lucrare sunt continuate si dezvoltate cercetarile anterioare ale colectivului de autori privind aplicarea instrumentatiei virtuale în diverse domenii ale cercetarii sau tehnicii: reglari de temperatura în diverse instalatii termice industriale (cu stabilizare sau dupa program),
comanda unor servomotoare (de curent continuu, pas cu pas), reglarea nivelelor lichidelor în vase tehnologice, controlul fortei de strîngere în dispozitive de prehensiune etc. Astfel, lucrarea a avut ca scop realizarea unor structuri hardware si software care sa permita efectuarea unor studii teoretice si experimentale privind conducerea dupa traiectorii dorite ale unor vehicule ghidate automat.
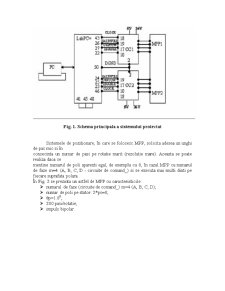
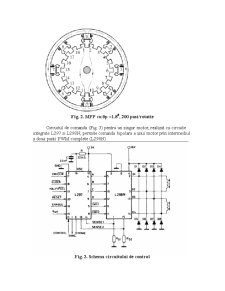
In acest scop s-a realizat, mai întâi, o platforma mobila, de dimensiuni reduse, echipata cu doua motoare electrice pas cu pas (MPP) si o roata libera. MPP actioneaza cele doua roti motoare si permit, în urma unor comenzi corespunzatoare, realizarea urmaririi unei traiectorii dorite. Pentru comanda MPP s-a adoptat perechea de de circuite integrate specializate L297 –L298N, produse de firma SGS Thomson Microelectronic , pentru care au fost proiectate si realizate circuitele aferente. Partea de software a fost dezvoltata în mediul de dezvoltare LabVIEW, rezultand în acest fel un ansamblu hardware – software flexibil, care permite efectuarea unor studii si cercetari experimentale de laborator, dat fiind dimensiunile reduse ale platformei mobile. Pentru a intelege AGV este necesar sa intelegem fundamentele ale sitemelor flexibile de fabricatie (FMS). FMS sunt un mijloc de fabricare a produselor. FMS este mai mult o psihologie. FMS este ideea ca rapiditatea este mai buna si foloeste masina pentru fabricarea produselor. In comparatie cu oamenii care ar face acelasi operatii masinile le fac 24 de ore pe zi. FMS foloesesc masini computerizate cu control numeric (CNC) pentru a forma o celula de lucru. Fiecare celula indeplineste o operatie specifica pentru a asista la fabricarea unui produs. Desi FMS este rapid si eficace nu este ieftin si are nevoie de multe masini scumpe . De obicei costa milioane de dloari pentru implementarea FMS intr-o fabrica. In loc sa foloseasca un FMS complet , multe companii folosesc parti din FMS numite celule de favricatie flexibile. Acestea sunt folosite pentru a realiza o parte a produsuli cu masini si cealata parte prin alte metode. De multe ori una sau mai multe AGV’s sunt folosite in FMS pentru a conecta celulele de lucru impreuna..
PROIECTAREA HARDWARE A VEHICULULUI GHIDAT AUTOMAT
Structura mecanica s-a ales sub forma unei platforme dreptunghiulare pe care se dispune sarcina de manipulat. Deplasarea robotului mobil este realizata cu ajutorul a trei roti din care doua sunt motoare ai una este directoare, libera..
Sistemul cuprinde urmatoarele elemente principale: un calculator pe care este instalat mediul de dezvoltare LabVIEW, o placa de achizitii LabPC+ (NATIONAL INSTRUMENTS)
montata intr-unul din sloturile PCI ale calculatorului, doua circuite de comanda (CC1 _i CC2) realizate cu circuite integrate L297 si L298N [8] alimentate de la surse separate, doua motoare pas cu pas electrice (MPP1 si MPP2 cu pasul 1.80/0.2N) care constituie sistemul de actionare al robotului mobil din care fac parte.
Preview document






















Conținut arhivă zip
- Vehicule Ghidate Automat.doc
Alții au mai descărcat și

CAPITOLUL I Introducere 1.1.Generalitati 1.1.1. Scurt istoric, definiţii Unul din cele mai importante aspecte în evoluţia fiinţei umane este...

1.Introducere Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte...

Capitolul 1 Introducere Platformele mobile robotice sunt utilizate cel mai des in interiorul fabricilor sau depozitelor pentru transportul de...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...

1. 1. FORMATE (SR ISO 5457:1994) Desenele tehnice se execută pe coli de formă dreptunghiulară, de dimensiuni fixe, numite formate (fig. 1.1)....
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

1. Introducere Denumirea ROBOT a fost introdusă de către scriitorul ceh Karl Capek în lucrarea sa ,,Roboţii universali ai lui Rossum”,(1921),...

Capitolu I.Introducere De la vechii greci ne-a rămas minunata legendă despre titanul Prometeu, care a răpit cerurilor focul şi l-a adus oamenilor....

INTRODUCERE Scopul lucrarii Sa se proiecteze un plotter care va avea rolul de a desena cu ajutorul unui marker pe un anumit spatiu de lucru....

1 Capitolul I – Generalităţi privind roboţii . 1.1 Ce este un robot? 1.1.1 Definiţie. Particularităţi. Din câte am observat după o documentare...
Capitolul 1 Introducere Platformele mobile robotice sunt utilizate cel mai des in interiorul fabricilor sau depozitelor pentru transportul de...

INTRODUCERE Unul din cele mai importante aspecte în evoluţia fiinţei umane este folosirea uneltelor care sa-i simplifice munca fizica. În aceasta...

1. Aplicaţii ale sistemelor de robocare 1.1 Sisteme de robocare pe roţi Sistemele de fabricaţie flexibile utilizate în producţia de serie mică şi...