
Cuprins
- 1. Chirurgie robotizata
- 1.1. Statie de lucru robotizata pentru chirurgia laparoscopica
- 1.2. Manipulator laparoscopic
- 1.3. Manipulator endoscopic
- 1.4. Interfata cu utilizatorul
- 2. Mediul virtual pentru simularea chirurgicala
- 3. Senzori tactili si stimuli
- 4. Teleoperatii bilaterale
- 5. Cunostinte globale in telechirurgie
Extras din proiect
1. Chirurgie robotizata
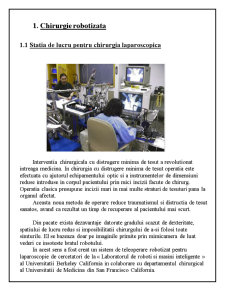
1.1. Statia de lucru pentru chirurgia laparoscopica
Interventia chirurgicala cu distrugere minima de tesut a revolutionat intreaga medicina. In chirurgia cu distrugere minima de tesut operatia este efectuata cu ajutorul echipamentului optic si a instrumentelor de dimensiuni reduse introduse in corpul pacientului prin mici incizii facute de chirurg. Operatia clasica presupune incizii mari in mai multe straturi de tesuturi pana la organul afectat.
Aceasta noua metoda de operare reduce traumatismul si distructia de tesut sanatos, avand ca rezultat un timp de recuperare al pacientului mai scurt.
Din pacate exista dezavantaje datorate gradului scazut de dexteritate, spatiului de lucru redus si imposibilitatii chirurgului de a-si folosi toate simturile. El se bazeaza doar pe imaginile primite prin mimicamera de luat vederi ce insoteste bratul robotului.
In acest sens a fost creat un sistem de teleoperare robotizat pentru laparoscopie de cercetatori de la « Laboratorul de roboti si masini inteligente » al Universitatii Berkeley California in colaborare cu departamentul chirurgical al Universitatii de Medicina din San Francisco California.
Robotul proiectat este un sistem bimanual cu doua brate manipulatoare cu 6 grade de libertate fiecare, ambele brate fiind dotate cu doua degete la capatul liber, precum si cu instrumente taietoare sau ciupitoare, controlate de o pereche de manipulatoare principale cu 6 grade de libertate.
In sistemul de operare robotizat instrumentele clasice sunt inlocuite de capetele bratelor robotului ce se afla sub controlul indirect al chirurgului prin intermediul computestului. Acest lucru se poate vedea in figura ce urmeaza.
Scopul cercetatorilor este acela de a inlocui capacitatile motorii si senzoriale ale chirurgului cu senzori ai sistemului de teleoperare si o mobilitate crescuta a bratelor robotului.
Costurile ridicate necesare crearii acestui sistem se justifica prin teleoperatiile chirurgicale pe care le poate efectua robotul, operatii care nu pot fi efectuate nici clasic si nici cu aparatura laparoscopica existenta la ora actuala in spitale.
Sistemul robotizat de laparoscopie prezinta o dexteritate crescuta, o precizie a miscarilor tridimensionale, si o coordonare ochi-brat mobil mult imbunatatita.
Aceste performante fac ca robotul de teleoperare sa poata fi folosit atat in spitale, precum si in mediul exterior cum ar fi campul de lupta.
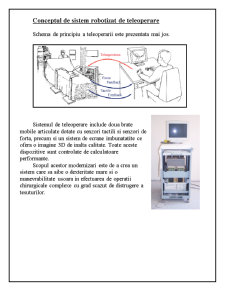
Conceptul de sistem robotizat de teleoperare
Schema de principiu a teleoperarii este prezentata mai jos.
....
Sistemul de teleoperare include doua brate mobile articulate dotate cu senzori tactili si senzori de forta, precum si un sistem de ecrane imbunatatite ce ofera o imagine 3D de inalta calitate. Toate aceste dispozitive sunt controlate de calculatoare performante.
Scopul acestor modernizari este de a crea un sistem care sa aibe o dexteritate mare si o manevrabilitate usoara in efectuarea de operatii chirurgicale complexe cu grad scazut de distrugere a tesuturilor.
Preview document













Conținut arhivă zip
- Teleloperare in Medicina.doc
Alții au mai descărcat și

Concluzii Interventia chirurgicala cu distrugere minima de tesut a revolutionat intreaga medicina. Aceasta noua metoda de operare reduce...

SCOPURILE SANATATII PUBLICE: 1.Promovarea sanatatii, care vizeaza ca oamenii sa fie tot mai sanatosi, apti de a participa la viata sociale (se...

Timp de peste o suta de ani, standardul in chirurgie s-a tradus prin deschiderea cat mai larga a bolnavilor, efectuarea interventiilor chirurgicale...