
Extras din proiect
Analiza dinamică a mecanismului conform sarcinii de proiect
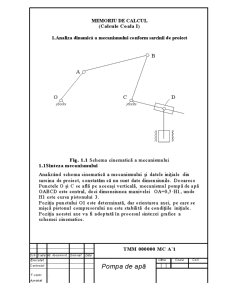
B
A
O C D
Fig. 1.1 Schema cinematică a mecanismului
1.1Sinteza mecanismului
Analizând schema cinematică a mecanismului şi datele iniţiale din
sarcina de proiect, constatăm că nu sunt date dimensiunile. Deoarece Punctele O şi C se află pe aceeaşi verticală, mecanismul pompă de apă OABCD este central, deci dimensiunea manivelei OA=0,5•H1, unde H1 este cursa pistonului 3.
Poziţia punctului O1 este determinată, dar orientarea axei, pe care se mişcă pistonul compresorului nu este stabilită de condiţiile iniţiale. Poziţia acestei axe va fi adoptată în procesul sintezei grafice a schemei cinematice.
Tabelul 1.1 - Dimensiunile elementelor
Parametrul Dimensiunea
Reală [mm] Trecută prin scară [mm]
μ = 0.002
S 0.22 110
a 0.175 87.5
lCB=R 0.262 131
lAC 0.317 158.5
lAB 0.396 198
lOA 0.112 56
1.2 Analiza structurală a mecanismului
Calculăm gradul de mobilitate a mecanismului
W =3n•2C5-C4 [1]
Pentru mecanismul dat avem n=4 (elemente mobile 1,2,3,4), C5=5 (cuple cinematice inferioare), c4=0 (cuple cinematice superioare).
0 (0,1) - cuplă cinematică de rotaţie; A (1,2) - cuplă cinematică de rotaţie; B (2,3) - cuplă cinematică de translaţie; C (3,4) - cuplă cinematică de rotaţie; D (4) - cuplă cinematică de translaţie;
Din analiza schemei structurale constatăm că elementele 0,1,2 efectuează mişcări de
rotaţie, elementele 3 şi 4 mişcare de translaţie, iar elementele.
Deci, gradul de mobilitate va fi: W = 3•4-2•5-0=2
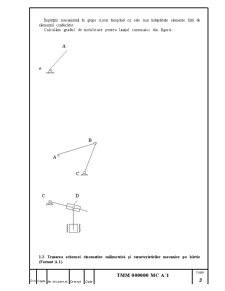
Împărţim mecanismul în grupe Assur începând cu cele mai îndepărtate elemente fată de elementul conducător.
Calculăm gradul de mobilitate pentru lanţul cinematic din figură:
A
o
B
A
C
C D
1.3 Trasarea schemei cinematice milimetrică şi caracteristicilor mecanice pe hârtie (Format A 1)
Pentru a putea desena mecanismul pe hârtie milimetrică (format Al) dimensiunile elementelor trebuie trecute prin scară astfel încât schema cinematică împreună cu diagramele mecanice să ocupe circa 0,25 din suprafaţa coalei Al. Analizând dimensiunile reale ale elementelor [Tabelul 1.1, coala 2] adoptăm coeficientul μ= 0.002 [m/mm]
1.4 Determinarea forţelor tehnologice
Forţele tehnologice care acţionează în mecanism, le determinăm după diagramele de indicator.
Proiectăm poziţiile succesive ale punctelor pe diagrama de indicator. Pentru 4 curse ale pistonului fixăm pe diagramă 8 puncte pentru un ciclu dinamic a pompei de apă.
În acelaşi mod proiectăm punctele Ft pe diagrama de indicator a compresorului. Spre deosebire de motor, ciclul dinamic al compresorului se încheie la un ciclu cinematic a pompei (o rotaţie a manivelei 8).
Preview document


















Conținut arhivă zip
- Teoria Mecanismelor si Masinilor.doc
Te-ar putea interesa și

CAPITOLUL 1 IMPORTANŢA ŞI NECESITATEA AMORTIZĂRII VIBRAŢIILOR ÎN CONSTRUCŢIA ŞI FUNCŢIONAREA AUTOVEHICULELOR 1.1. INFLUENŢA VIBRAŢIILOR ASUPRA...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

TEMA DE PROIECT Pentru mecanismul din figura se cunosc l1, l3, l4, a, b, m1, m2, m3, m4, m5, n1, F5u, ´. Se cer: 1. Analiza configuratiei si a...

Introducere OBTINEREA PIESELOR PRIN DEFORMARE PLASTICA Prelucrarea materialelor metalice prin deformare plastica se bazeaza pe proprietatea de...

Introducere Construirea economiei de piaţă este un proces nou, de o complexitate deosebită, ce necesită multiple mutaţii economice, sociale şi...

Introducere Elaborarea acestui proiect contribuie la consolidarea materiei teoretice a bazelor proiectării maşinilor, conceperea mai profunda a...

PROIECTAREA UNUI MECANISM CU BARE Sa se efectueze analiza structurala,cinematica si cinetostatica pentru mecanismul manivela-piston...

Tema proiectului conține funcțiile principale pe care trebuie să le îndeplinească transmisiile mecanice proiectate cât și caracteristicile...