
Extras din proiect
Sudarea este procedeul cel mai raspindit in industria constructoare de masini, prin care se obtin imbinari nedemontabile, pentru executarea operatiilor de sudare fiind folosit un mare numar de operatori umani. Calitatea sudurilor executate de operatorul uman depinde, in foarte mare masura, de dexteritatea si constiinciozitatea sudorului, care trebuie sa execute miscarile necesare operatiei de sudare cu mare regularitate si precizie.
Pe de alta parte, sudorii lucreaza in conditii de mediu total neprielnic; ei sunt expusi la radiatii calorice si luminoase, inhaleaza fum, lucreaza de multe ori in pozitii foarte dificile, pot fi stropiti cu metal topit si trebuie sa aiba atentia concentrata la maximum in permanenta.
Cele prezentate mai sus justifica interesul tot mai crescut al producatorilor de a trece a automatizarea operatiei de sudare, aceasta si pentru faptul ca operatiile de sudare executate de operatorul uman sunt foarte scumpe.
Daca in cazul productiei de serie mare sau masa se cunosc de mai mult timp sisteme pentru sudarea automata sau semiautomata, in productia de serie mica sau mijlocie executarea automata a operatiilor de sudare necesita mijloace flexibile, care sa permita adaptarea rapida la variabilitatea produselor. Aceste mijloace sunt robotii industriali de sudare, instalatii specifice de alimentare cu material, dispozitive speciale de pozitionare, scule de lucru specifice.
Pot fi automatizate cu ajutorul robotilor industriali operatiile de sudare in puncte si de sudare continua cu arc in mediu de gaz protector. In ambele cazuri, asamblarea prin sudura se realizeaza din doua sau mai multe piese.
Sudarea prin presiune in puncte sau prin rulare asistata de roboti se regaseste, in special, in celulele si liniile flexibile pentru asamblarea caroseriilor de autovehicule, permitind trecerea usoara de la fabricarea unui autovehicul la altul. De altfel, Corporatia General Motors a realizat inca din anul 1969 o linie robotizata de sudare prin puncte, deservita de 38 de roboti industriali Unimate, pentru sudarea caroseriei autoturismului "Vega".
Celulele si liniile flexibile pentru sudare cu arc asistate de roboti s-au organizat in special in intreprinderi constructoare de vehicule feroviare, masini de ridicat si transportat uzinal, miniere, santiere navale, urmarindu-se automatizarea sudarii unor subansambluri de tip grinda, traversa, cheson etc.
Robotizarea operatiilor de sudare prezinta urmatoarele avantaje:
-usurarea muncii sudorilor, prin protejarea lor de caldura, gazele/fumul si radiatiile emanate intensificarea parametrilor procesului de sudare, operatorul uman fiind indepartat de zona de producere a noxelor;
-imbunatatirea calitatii sudurilor executate (puncte de sudura pozitionate precis, cusaturi uniforme), reducerea volumului lucrarilor de remaniere.
Ca urmare a celor de mai sus, se poate obtine o crestere a productivitatii muncii la instalatiile de sudare servite de roboti in medie cu 100%.
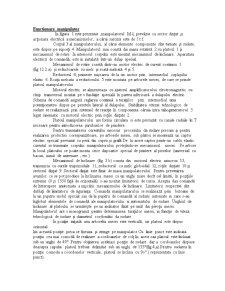
Rotirile diferitelor subansamble ale dispozitivelor prezentate se realizeaza la unghiuri cuprinse intre 90 si 360 de grade, la precizii foarte ridicate ale miscarii de rotatie, de cca.5 s.
MANIPULATOARE SI DISPOZITIVE PENTRU ROBOTIZARE IN SUDURĂ
Instalaţiile aducătoare şi de evacuare sînt componente ale sistemelor de
manipulare, a căror funcţii sunt generarea unor anumite mişcări ale obiectelor de manipulat şi efectuarea acestora în conformitate cu o anumită logica secvenţiala şi cu cerinţele de manipulare oare urmează a fi realizate.
In cadrul instalaţiilor de manipulare şi a diapozitivelor ajutătoare robotizării intră o serie de subsisteme care realizează funcţii de depozitare, separare, ordonare,transfer, colectare, distribuire, prezenţă, numărare, dozare, interschimbare,livrare, poziţionare, fixare, defixare sortare şi control.
Prin poziţionare se înţelege, funcţia aducătoare prin intermediul căreia
se stabileşte poziţia obiectului manipulat în raport cu un dispozitiv, instalaţie,maşină sau utilaj. Fixarea este funcţia aducătoare prin care obiectul manipulat se imobilizează în raport cu elementul faţă de care a fost poziţionat. Poziţionarea şi fixarea poartă împreună denumirea de instalare.
Dispozitivele de poziţionare, de rotire,de Întoarcere, standurile cu
role şi manipulatoarele contribuie la realizarea robotizării complexe în sudare şi sînt indispensabile unui sistem robotizat.
MANIPULATOARE
Manipulatoarele se clasifica după: construcţia mecanismelor de acţionare ale sistemului de rotire şi înclinare al piesei după unghiul maxim de înclinare şi sarcină.
Sistemul de acţionare al manipulatorilor poate fi electric sau hidraulic. Manipulatoarele moderne au de regulă mecanism de reglare continuă a vitezei de rotaţie. Primele modele de manipulatoare aveau mecanismul de reglare a mişcarii de rotaţie cu roţi de schimb,ceea ce asigura o variaţie în trepte a turaţie.
Acţionarea mecanismului de înclinare ai manipulatoarelor de asemenea
poate fi electrică sau hidraulica. Modelele destinate sarcinilor relative mici pot avea im mecanism de înclinare cu acţionare manuală. Unghiul, de înclinare maxim al platourilor este cuprins între 45…360° şi depinde de constructia manipulatorului, ca si de sarcina lui.
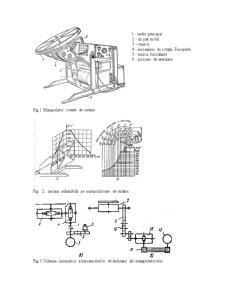
Marea majoritate a modulelor existente sînt manipulatoare cu sector dinţat şi cric. Ele se caracterizează prin dispunerea tuturor mecanismelor în in¬teriorul corpului general. Pe acelaşi corp se află platoul de care se prinde piesa şi in acest fel, în poziţia sa iniţiala,piesa este dispusă deasupra corpului, ceea ce conferă manipulatorului o bună capacitate. Manipulatoare de sudare (fig. 1) nu sunt numai pentru instalarea acestui produs în diferite poziţii, dar, de asemenea, de al roti cu viteza de lucru. Sudare manipulator universal constă dintr-un cadru principal 1, cadrul mobil 2, o masca 3, masca de cotitură mecanism de 4, 5 mecanism de înclinare şi masca unitatea de ridicare masca, împreună cu un pat mobil, pat care are picioare de aterizare 6, pentru a asigura stabilitatea manipulator cu produsul în locaţii diferite. Motorul, mecanismele de control pentru pat, masca este plasat în panoul de control. În masca are sloturi pentru montarea produsului sau de asamblare - accesorii pentru sudare. Gadgets poate fi instalat de asemenea şi, în locul masca.
Preview document




Conținut arhivă zip
- Manipulator.doc
Alții au mai descărcat și

1. Rolul si funcţiile mărcilor Apariţia mărcilor a avut loc în timpuri străvechi, în momente greu de precizat. Din dorinţa de a-şi proteja...

1. Carburarea Metoda de carburare descrisă se poate aplica pe instalaţii de tratament termic în strat fluidizat încălzită cu gaz, unde faza de...

Corespunzator destinatiei lor,la elaborarea materialelor magnetic moi se urmareste sa se obtina: - inductie remanenta mica; - permeabilitate...

Introducere. Generalitati Multe articole fabricate mai demult din lemn, metal sau alte materiale se fac astazi din material plastic. Toate...


Se crede ca aurul a fost descoperit inaitea cuprului . Cules sub forma unor bucati stralucitoare din nisipurile raurilor si depunerile aluvionare ,...

PRINCIPIUL OBT PIESEI PRIN TURNARE:obt unei piese prin turnare consta in umplerea unei cavitati cu topitura mat sau aliajului.pt piesa 1 se fol un...

Prin determinarea proprietăţilor mecanice în condiţii de exploatare s-a constatat că proprietăţile mecanice ale fontei cu grafit nodular sînt pe...
Te-ar putea interesa și

CAPITOLUL I Masuri pregatitoare pentru receptionarea porumbului stiuleti I.1. Masuri tehnico-organizatoare Pentru organizarea si desfasurilor in...

CAPITOLUL 1 Modelare si strategii de conducere a manipulatoarelor robotice 1.1. Introducere în problematica robotilor industriali Notiunea de...

Lista figurilor Figura 4.1: Reprezentarea cotelor de piaţă deţinute de principalii competitori 72 Figura 4.2: Evoluţia titlurilor Amonil în...

Abstract Manipulation in comercial purpose exists from the beginings of the world. Begining to be more and more efficacious when the sublime...

Argument Obiectul. În lucrarea de faţă ne propunem să punem în discuţie unele aspecte ale manipulării prin informaţie: definirea conceptului,...

Introducere Prin intermediul lucrării de faţă, Manipularea prin talk-show-ul politic, mi-am propus să descriu, cu ajutorul lucrărilor de...

PUBLICITATEA CA MIJLOC DE MANIPULARE MOTTO: ,,Descoperiţi mijloacele de convingere disponibile într-un caz” (Aristotel) I. OMUL ŞI MANIPULAREA...

Introducere Este evident faptul că noi toţi experimentăm această lume folosindu-ne de anumite “strategii”. Lăsăm în exterior să se vadă un anume...