
Extras din referat
Analiza efectelor parametrilor de acord
ai legilor de reglare P, PI, PID
asupra proceselor de ordinul I şi ordinul II
Scopul lucrării: Analiza efectelor parametrilor de acord ai legilor de reglare P, PI şi PID asupra proceselor de ordinul I şi ordinul II, in buclă inchisă, din punctul de vedere al următorilor parametri ce caracterizează răspunsul indicial al SRA obţinut: timp de creştere, timp tranzitoriu, suprareglaj şi eroare staţionară.
Suprareglajul σ reprezintă depăşirea maximă a ieşirii faţă de valoarea sa de regim stationar y_st,exprimată in procente.
=(y_max-y_st)/y_st *100
Timpul tranzitoriu〖 t〗_treprezintă timpul in care ieşirea y a
sistemului intră şi rămane intr-o bandă de ±2÷5% din valoarea sa de regim
staţionar y_st.
Timpul de creştere t_c reprezintă timpul in care ieşirea sistemului variază de la 0.1 la 0.9 din valoarea sa de regim staţionar y_st.
Eroarea staţionară la intrare treaptă 〖〗_st reprezintă in
cazul de faţă diferenţa dintre ieşirea sistemului şi intrarea acestuia în regim
staţionar. Pentru SRA:
〖〗_st =r_st −y_st
unde r_st este valoarea finală a treptei de referinţă aplicată la intrare.
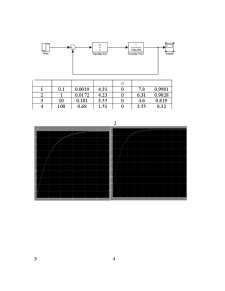
Legea de reglare de tip P:
III.Observaţii şi concluzii:
Pentru un regulator de tip P dacă variem Kr în sens crescător observăm ca timpul de creştere (Tc) scade, suprareglajul (Ϭ) rămâne constant la valoarea 0, timpul tranzitoriu (Tt) scade iar eroarea staţionară la intrarea treaptă (Зst) scade.
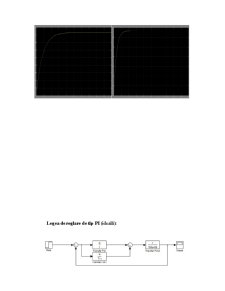
Pentru un regulator de tip PI daca variem Ti în sens crescător observăm ca timpul de creştere (Tc) creşte, suprareglajul (Ϭ) scade, timpul tranzitoriu (Tt) creşte iar eroarea staţionară la intrarea treaptă (Зst) rămâne constant la valoarea 0.
Pentru un regulator de tip PI daca variem Kr în sens crescător observăm ca timpul de creştere (Tc) scade, suprareglajul (Ϭ) creşte, timpul tranzitoriu (Tt) scade iar eroarea staţionară la intrarea treaptă (Зst) rămâne constant la valoarea 0.
Pentru un regulator de tip PID daca variem Td în sens crescător observăm ca timpul de creştere (Tc) creşte, suprareglajul (Ϭ) scade, timpul tranzitoriu (Tt) scade iar eroarea staţionară la intrarea treaptă (Зst) rămâne constant la valoarea 0.
Preview document






Conținut arhivă zip
- Bazele Sistemelor Automate.docx
Alții au mai descărcat și

În conditiile unei economii competitive, a concurentei dintre firmele ce lucreaza în acelasi domeniu, cresterea productivitatii, rezolvarea rapida...

Sisteme de-a lungul timpului In conditiile unei economii competitive in care profitul creste proportional cu calitatea serviciilor oferite, iar...

Istoric Proiectul a inceput in Noiembrie 2004. Ideea initiala era sa se foloseasca o placa de dezvoltare MC9S12NE64 pentru teste , ca mai apoi...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

In multe aplicatii este nevoie de un element care sa prezinte 2 stari diferite, cu posibilitatea de a trece dintr-o stare in cealalta, fara sau in...

Cerintele sistemului operational Odata ce a fost definita nevoia si abordarea tehnica, e necesar sa le tranlatam intr-un “scenariu...

folosesc în cazul sistemelor de conducere cu automate programabile trebuie, la început, sa fac o delimitare a automatelor programabile de celelalte...
Te-ar putea interesa și

INTRODUCERE Lucrarea „ Proiectarea acţionărilor electropneumatice din componenţa unei staţii de sortare automată” are ca scop prezentarea...

1.1 Abordarea sistematica a întreprinderii Notiunea de sistem are un caracter relativ, în sensul ca orice sistem poate fi descompus în subsisteme...

INTRODUCERE În afara consumului de putere şi energie activă pentru exploatarea reţelelor electrice interesează şi consumul de putere şi energie...

CAP. I Ce este multimedia- Sisteme multimedia. Aplicaţii. Protocoale I.1 Abordarea conceptului de multimedia În ultimii patruzeci de ani,...

OBIECTIVELE Proiectului Işi propune evidenţierea elementelor de bază ale proiectării subansamblurilor mecanice, utilizate la autovehicule rutiere....

Capitolul 1 Rolul şi locul traductoarelor în sistemele automate 1.1. Traductorul, element funcţional tipic al sistemelor automate Una din...

Scopul acestei practici este însuşirea tehnologie de proiectare a obiectelor energetice şi consolidarea cunoştinţelor acumulate la universitate în...

S1 Sistem = modelu fizic realizabil al unei structuri de elemente fizice la care singurele legături cu exteriorul sunt mărimile de cauză şi cele de...