Extras din referat
folosesc în cazul sistemelor de conducere cu automate programabile trebuie, la început, sa fac o delimitare a automatelor programabile de celelalte calculatoare care sunt folosite în cazul unui sistem de domotica. Aceasta este cu atât mai necesar cu cât exista automate programabile implementate pe PC, asa numitele Soft-PLC.
Automatele programabile (AP) pot fi considerate microcalculatoare specializate care functioneaza în timp real, adica asigura o limita maxima pentru durata procesului de achizitie, prelucrare si redare a informatiilor. Arhitectura tipica a unui AP este prezentata în Fig. 1. Se observa rolul important al intrarilor/iesirilor logice si analogice si al posibilitatilor de extensie.
Intr-un sistem de domotica, Fig. 2, pot exista la nivelul de management si nivelul de automatizare calculatoare care nu îndeplinesc conditia de functionare în timp real, de exemplu diversele servere (web, baze de date, ftp, etc), gateway sau statii clienti. Sistemul lor de programare este diferit de cel pentru AP.
Desi în Fig. 2 nu apar, aproximativ 20% dintre calculatoarele folosite în conducerea automata în timp real nu sunt de tip AP, principala deosebire constând în caracteristicile software care permit o programare mai elastica. Într-adevar, schema de functionare pentru AP consta în scanarea intrarilor, executarea algoritmului de conducere, actualizarea iesirilor si realizarea operatiilor de întretinere. Proiectarea în aceasta situatie este concentrata asupra
algoritmului de conducere deoarece ciclurile de intrare, iesire si întretinere sunt ascunse.Celelalte tipuri de calculatoare folosite în conducerea automata, numite PAC (Programmable Automation Controller) ofera un acces mai profund la resursele hardware ale sistemului.
Si din Fig. 2 se observa rolul important al intrarilor/iesirilor si comunicarii prin
magistrala (bus) de automatizare si magistralele de câmp. Automatele programabile pot juca diferite roluri într-un sistem de domotica: interconectare directa I/E, Interconectare I/E prin intermediul magistralei de câmp sau gateway între magistrale.
Semnalele I/E logice si analogice sunt prelucrate în mod diferit, Fig. 3 si din aceasta cauza si metodele de proiectare sunt diferite. Esantionarea cu o perioada constanta este esentiala atât pentru semnalele analogice cât si pentru semnalele logice. In continuare ma voi referii numai la proiectarea sistemelor cu evenimente discrete care folosesc AP.
Proiectarea unui sistem de conducere cu AP are cel putin urmatoarele etape:
1. Identificarea procesului.
2. Stabilirea algoritmului de conducere si a performantelor necesare.
3. Programarea AP
4. Configurarea AP
Orice discutie privind proiectarea sistemelor de conducere cu automate programabile nu poate fi facuta în afara standardelor IEC 61131 si IEC 61499. Standardul IEC 61131 are urmatoarele sectiuni:
- IEC 61131-1 Generalitati
- IEC 61131-2 Testare
- IEC 61131-3 Programare si tipuri de date
- IEC 61131-4 Ghidul utilizatorului
- IEC 61131-5 Comunicatii
- IEC 61131-7 Conducerea Fuzyy
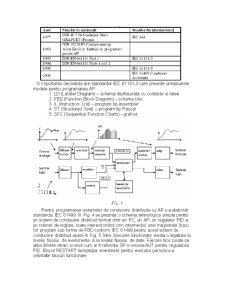
Evolutia standardelor referitoare la AP este prezentata în tabelul urmator:
O importanta deosebita are standardul IEC 61131-3 care prevede urmatoarele modele pentru programarea AP:
1. LD (Ladder Diagram) – schema desfasurata cu contacte si relee
2. FBD (Function Block Diagram) – schema bloc
3. IL (Instruction List) – program tip assembler
4. ST (Structured Text) – program tip Pascal
5. SFC (Sequential Function Charts) –grafcet
Pentru programarea sistemelor de conducere distribuite cu AP s-a elaborat standardul IEC 61499. În Fig. 4 se prezinta o schema tehnologica simpla pentru un sistem de conducere distribuit format dintr-un PC, un AP, un regulator PID si un robinet de reglare, toate interactionând prin intermediul unei magistrale (bus). Un program sub forma de FBD conform IEC 61499 pentru acest sistem de conducere distribuit apare în Fig. 5. Între blocurile functionale exista o legatura la nivelul fluxului de evenimente si la nivelul fluxului de date. Fiecare bloc poate sa aiba diferite intrari si iesiri cum ar fi referinta SP si iesirea AUT pentru regulatorul PID. Blocul RESTART furnizeaza eveniment pentru executia periodica a celorlalte blocuri functionale.
Preview document










Conținut arhivă zip
- Proiectarea Sistemelor de Conducere cu Automate.doc
Alții au mai descărcat și

1. Tema proiectului Se va proiecta sistemul de automatizare pentru o locuinta individuala structurata pe doua niveluri: parter si etaj. In...

Capitolul 1 1. Introducere • Importanţa teoriei şi tehnicii reglării automate Reglarea automată ocupă un loc important în ansamblul metodelor...

Tema proiectului Subiectul nr.11 Sa se proiecteze dispozitivul de comanda pentru un automat de schimbat bancnote. Se considera ca se schimba...

În conditiile unei economii competitive, a concurentei dintre firmele ce lucreaza în acelasi domeniu, cresterea productivitatii, rezolvarea rapida...

Automatele programabile (AP) sunt echipamente electronice destinate realizării instalaţiilor de comandă secvenţiale în logică programată. Din punct...

Sisteme de-a lungul timpului In conditiile unei economii competitive in care profitul creste proportional cu calitatea serviciilor oferite, iar...

Analiza efectelor parametrilor de acord ai legilor de reglare P, PI, PID asupra proceselor de ordinul I şi ordinul II Scopul lucrării: Analiza...

Noţiuni introductive Definiţiile date conceptului de ambalare sunt extrem de numeroase, uneori existând chiar deosebiri de nuanţa în ceea ce...
Te-ar putea interesa și

INTRODUCERE Lucrarea „ Proiectarea acţionărilor electropneumatice din componenţa unei staţii de sortare automată” are ca scop prezentarea...

1. Introducere Scopul principal al unei sere este de a îmbunătăți condițiile de mediu în care plantele sunt crescute. Serele permit o monitorizare...

Capitolul 1. Introducere 1.1 Introducere în proiect Titlul lucrării este „Vehicule Autonome - Sisteme de asisten.ă de menținere a benzii de...

Capitolul I DOTAREA ECONOMICĂ CU SCULE, DISPOZITIVE ŞI VERIFICATOARE 1.1 ACTIVITĂŢILE S.D.V. ÎN SISTEMUL INFORMAŢIONAL AL ÎNTREPRINDERII În...

ANALIZA SI PROIECTAREA SISTEMELOR INFORMATICE INTRODUCERE Analiza si proiectarea sistemelor informatice comporta o varietate mare de activitati...

1. INTRODUCERE 1.1. Introducere în contextul sistemelor de conducere Procesele automatizate de la care se pretind specificatii dorite ca...

fiscalitate 1. Finantele reprezinta: a. stiinta procurarii veniturilor necesare familiilor si a modului de utilizare (cheltuire) a acestora b....

În evoluţia sa omenirea a fost preocupată de realizarea unor dispozitive, mijloace tehnice, care să solicite cât mai puţin prezenţa omului pentru o...