Extras din referat
Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte insemnata din efortul fizic depus. Astfel a construit jucarii automate si mecanisme inteligente sau si-a imaginat robotii in desene, carti, filme "SF" etc.
Termenul "robot" a fost folosit in 1920 de cehul Karel Capek intr-o piesa numita "Robotul universal al lui Kossum". Ideea era simpla: omul face robotul dupa care robotul ucide omul. Multe filme au continuat sa arate ca robotii sunt masinarii daunatoare si distrugatoare.
Dupa 1977 tendinta multor producatori a fost de a umaniza forma robotilor si de a crea androizii.
In 1941 Isaac Asimov a folosit cuvantul "robotizare" pentru descrierea tehnologiei robotilor si a prezis cresterea unei industrii robotice puternice. In 1956 a luat fiinta prima companie ce realiza roboti industriali, iar in 1961 Compania de automobile "Genral Motors" "angaja" primul robot industrial. Incepand cu 1980 asistam la o expansiune a robotilor industriali in diverse industrii.
Robotii ofera beneficii substantiale muncitorilor, industriilor si implicit tarilor. In situatia folosirii in scopuri pasnice, robotii industriali pot influenta pozitiv calitatea vietii oamenilor prin inlocuirea acestora in spatii: periculoase, cu conditii de mediu daunatoare omului, cu conditii necunoscute de exploatare etc.
Este adevarat ca robotii industriali prin calitatile lor pot cauza reduceri masive de personal acolo unde sunt implementati, dar creeaza si meserii alternative:
- tehnicieni in industria roborizarii;
- ingineri;
- vanzatori;
- programatori;
- supervizori etc.
Beneficiile introducerii robotilor in industrie includ managementul controlului si al productivitatii si cresterea evidenta a calitatii produselor. Robotii pot lucra zi si noapte fara a obosi sau a-si reduce performanta. Consecvent realizeaza reduceri substantiale ale pretului de cost in primul rand prin reducerea consumurilor de materii prime si al prelucrarii automate a acestora. De asemenea utilizarea robotilor aduce avantaje pe piata concurentiala. Prin dezvoltarea rapida a industriei si a tehnicii de calcul, putem observa evolutia robotilor industriali catre generatiile inteligente ce le ofera caracteristica de a "intelege" mediul in care lucreaza.
Structura generala a robotilor industriali depinde foarte mult de utilitatea si scopul pentru care sunt produsi. Functiile de baza sunt reprezentate de:
- subsistemul cinematic;
- subsistemul de actionare;
- subsistemul de comanda si programare;
- subsistemul senzorial.
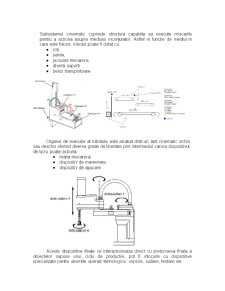
Subsistemul cinematic cuprinde structura capabila sa execute miscarile pentru a actiona asupra mediului inconjurator. Astfel in functie de mediul in care este folosit, robotul poate fi dotat cu:
- roti;
- senile;
- picioare mecanice;
- diversi suporti
- benzi transportoare
Preview document









Conținut arhivă zip
- Roboti Industriali.doc
Alții au mai descărcat și

1. Generalitati. În practica industriala de pâna acum, automatizarea se realiza mai ales în cadrul unor sisteme rigide de tipul liniilor de...

Se considera un robot destinat unei linii de acoperire galvanica. Procesul tehnologic intr-o astfel de linie cuprinde 6 posturi, 5 pentru...

Definirea sistemului flexibil de prelucrare Sistemul flexibil de prelucrare SFP poate fi definit ca un ansamblu integrat de maşini-unelte...

INTRODUCERE Unul din cele mai importante aspecte în evoluţia fiinţei umane este folosirea uneltelor care sa-i simplifice munca fizica. În aceasta...

Robotul 1 preia piesele de masa rotativa si le depune in bufferul corespunzator de la i1, i2, i3. Piese;e sunt luate numai din pozitia PA1 rotind...

Enunt: Se considera montajul de mai jos: In linia de fabricatie prezentata mai sus sunt prelucrate trei tipuri de piese. Linia este formata din...

Cunoasterea duratei de timp de la semanat pâna la rasaritul plantelor mai are însemnatate si pentru obtinerea unor productii cat mai timpurii. Daca...

- Proiectarea automatelor cu stări finite în logică cablată şi logică programată Sistemele de conducere cu stari finite pot fi realizate in logica...
Te-ar putea interesa și

CAPITOLUL 1 Prezentarea generală a roboţilor industriali 1.1 Descrierea roboţilor industriali Actualmente, mediile industriale trebuie să...

Capitolul I 1.1. Roboții industriali Robotul industrial este reprezentat printr-o mașină automată ce poate fi programată, pentru deplasarea...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

INTRODUCERE Lucrarea de licentă analizează cinematica mecanismelor din compunerea roboţilor, bazele teoretice ale dinamicii roboţilor industriali...

1. ROBOTI INDUSTRIALI - INTRODUCERE Robotica este un domeniu al ştiinţei şi tehnicii relativ nou, cu o rapidă dezvoltare, legat de realizarea şi...

Rezumat Ȋn lucrarea de faţă este prezentat un robot industrial cu mişcări de rotaţie şi translaţie comandat de un controler logic programabil....

. Definitia robotului si a robotului industrial Robotul este un sistem cu functionarea automata, adaptabila prin programare conditiilor mediului...

CARACTERISTICILE ROBOTILOR PUMA 600 Schema cinematica a robotului industrial PUMA 600 este redata în figura de mai jos: Acest robot industrial...