Cuprins
- Generalitati 1.1 pagina 2-8
- Clasificarea sistemelor de reglare automata 1.2 pagina 9-15
- Regimurile de functionare a sistemelor de reglaj automat 1.3 pagina 16
- Performantele sistemelor de reglaj automat 1.4 pagina 17
- Bibliografie pagina 20
Extras din referat
1.1 Generalitati
Prin automatizarea proceselor de productie se urmareste eliminarea interventiei directe a omului în aceste procese, asigurându-se desfasurarea lor în conformitate cu anumite cerinte impuse, fara interventia operatorului.
Principalele avantaje ale automatizarii constau în:
- cresterea productivitatii muncii;
- îmbunatatirea calitatii muncii;
- reducerea efortului intelectual depus de oameni în cadrul procesului de productie.
În structura oricarei instalatii automatiyate se disting:
- instalatia tehnologica;
- dispozitivul de automatizareS
Instalatia tehnologica cuprinde ansamblul utilajelor în care se desfasoara procesul tehnologic iar dispozitivul de automatizare reprezinta totalitatea elementelor care asigura automatizarea instalatiei tehnologice. Instalatia tehnologica împreuna cu dispozitivul de automatizare formeaza sistemul automat.
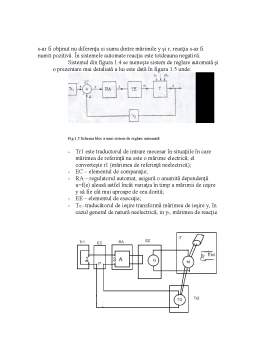
Cele mai simple sisteme automate sunt sistemele de comanda automata; un asemenea sistem este reprezentat in figura 1.1, unde:
S1 (IT) reprezinta instalatia tehnologica:
S2 – dispozitivul de automatizare.
Semnalele (curenti sau tensiuni) care apar la iesirile sau intrarile blocuriilor din sistem sunt:
u – marimea de comanda;
m – marimea de executie;
y – marimea de iesire.
Modificarea dupa dorinta a marimii de iesire y se obtine prin modificarea marimii de comanda u fara interventia directa a operatorului uman asupra instalatiei tehnologice.
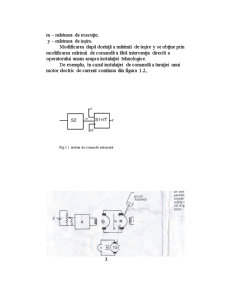
De exemplu, în cazul instalatiei de comanda a turatiei unui motor electric de current continuu din figura 1.2,
Fig. 1.2 Sistem de comanda a turatiei unui motor de curent continuu.
marimea de comanda este deplasarea d a cursorului fata de capatul inferior al potentiometrului, marimea de executie este tensiunea U2 aplicata motorului iar marimea de iesire poate fi considerata turatia motorului M sau tensiunea data de tahogeneratorul TG si proportionala cu aceasta turatie. Instalatia tehnologica o constituie motorul iar dispozitivul de automatizare este format din amplificatorul A si generatorul G. Turatia motorului este marita sau micsorata dupa cum cursorul potentiometrului este deplasat în sus sau în jos. Exista, asadar, o lege de dependenta y=f(u)
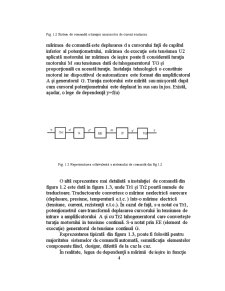
Fig. 1.3 Reprezentarea echivalenta a sistemului de comanda din fig 1.2
O alta reprezentare mai detaliata a instalatiei de comanda din figura 1.2 este data in figura 1.3, unde Tr1 si Tr2 poarta numele de traductoare. Traductoarele convertesc o marime neelectrica oarecare (deplasare, presiune, temperatura e.t.c. ) într-o marime electrica (tensiune, current, rezistenta e.t.c.). În cazul de fata, s-a notat cu Tr1, potentiometrul care transforma deplasarea cursorului în tensiunea de intrare a amplificatorului A si cu Tr2 tahogeneratorul care converteste turatia motorului in tensiune continua. S-a notat prin EE (element de executie) generatorul de tensiune continua G.
Reprezentarea tipizata din figura 1.3, poate fi folosita pentru majoritatea sistemelor de comanda automata, semnificatia elementelor componente fiind, desigur, diferita de la caz la caz.
În realitate, legea de dependenta a marimii de iesire in functie.
Preview document

















Conținut arhivă zip
- Elemente de Teoria Sistemelor de Reglare Automata.doc
Alții au mai descărcat și

1. Tema de proiectare Tema de proiectare se refera la un preamplificator de audiofrecventa de intrare avand schema bloc prezentata în figura 1....

TRADUCTOARE A. CONVERTIREA MĂRIMILOR DE MĂSURAT IN AUTOMATIZARE Elementele de automatizare, ca de altfel şi multe alte clemente cunos¬cute în...

Magnetronul.Cuptorul cu microunde. Magnetronul Magnetronul este un tub electronic in care, in urma actiunii comune a campului electric si...

Funcţia esenţiala a unui amplificator de audiofrecvenţa de putere este preluarea unui semnal audio de ordinul sutelor de milivolţi şi amplificarea...

Clasificarea amplificatoarelor Un amplificator consta in unul sau mai multe etaje de amplificare. Ele se pot clasifica dupa urmatoarele criterii....

I.Generalitati Utilizarea cablajelor (circuitelor) imprimate constituie actualmente solutia constructiva cea mai performanta si mai raspândita de...

Obiectul lucrarii: Analiza raspunsului unui amplificator trece banda,cu circuit derivatie,circuit cuplat slab si respectiv circuit cuplat...

Te-ar putea interesa și

CAPITOLUL I CONSIDERATII PRIVIND MODELAREA MATEMATICA 1.1 Aspecte generale Modelul matematic reprezinta, într-o acceptiune nepretentioasa, o...

Argument Automatica reprezintă totalitatea mijloacelor tehnice care permit neintervenţia omului in procesul de producţie. Este interesant de...

Introducere În incercarea definirii administratiei publice , profesorul Antonie Iorgovan , pleacă de la ideea ca administratia publica este o...

.Studiul elementului de întârziere de ordinul 1 1.1 Calculul răspunsului indicial prin rezolvarea ecuațiilor diferențiale T (dy(t))/dt +...

1.1 Generalităţi Prin automatizarea proceselor de producţie se urmareşte eliminarea intervenţiei directe a omului în aceste procese, asigurându-se...

SISTEM DE ACȚIONARE ELECTRICĂ CU M.C.C. (SA-m.c.c.) A. Obiectivele proiectului: Parcurgerea principalelor etape de proiectare algoritmică a unei...

1. Studiul elementului de intarziere de ordinul 1 1.1 Deducerea analitica a raspunsului indicial prin rezolvarea ecuatiei diferentiale;...

Scheme de comanda conventionale. Relee intermediare. 1. Scheme conventionale Schema electrica este o reprezentare grafica simplificata a unui...