Cuprins
- 1. Motorul sincron cu magneți permanenți .3
- 2. Particularitățile pornirii unui motor sincron cu magneți permanenți ..4
- 3. Estimarea poziției și vitezei rotorului, la motorul sincron cu magneți permanenți .5
- 3.1. Estimator de tip PLL (phase-locked loop = buclă închisă de fază) .6
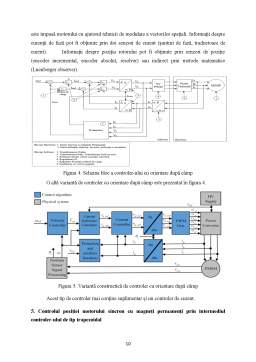
- 4. Controlul poziției motorului sincron cu magneți permanenți prin intermediul controler-ului cu orientare după câmp ...9
- 5. Controlul poziției motorului sincron cu magneți permanenți prin intermediul controler-ului de tip trapezoidal 10
- 6. Bibliografie ..11
Extras din referat
1. Motorul sincron cu magneți permanenți
Spre deosebire de mașinile sincrone clasice, care sunt utilizate, prin excelență, în regim de generator, mașinile sincrone excitate cu magneți permanenți sunt utilizate, cu preponderență, ca motoare.
Cea mai importantă caracteristică a acestor mașini este reprezentată de caracteristica unghiulară, m = f(θ).
Pentru simplitate, în analiză, se va considera cazul mașinilor sincrone cu poli înecați.
Dacă θ0 ≤ 0 (θ0 fiind unghiul inițial de poziție al rotorului, legat de unghiul intern al mașinii, δ prin relația:
θ_0=-π/2-δ
și neglijând rezistența înfășurării statorice (R = 0), pentru cuplul electromagnetic dezvoltat de motor (considerat trifazat) se obține:
M=(3UE_f0)/(ωX_s ) sin|θ_0 |
în care: U este tensiunea de fază statorică, Ef0 este tensiunea indusă prin mișcarea magnetului permanent, ω reprezintă pulsația curenților statorici, iar Xs reprezintă reactanța sincronă.
Pe baza relației anterioare se pot trasa caracteristicile unghiulare ale motorului. În realitate, valoarea maximă a cuplului sincron depinde, într-o măsură importantă, de valoarea rezistenței statorice. Se notează cu:
m=M/M_max
cuplul relativ la cuplul maxim.
Cuplul maxim se obține pentru δ = 0 și Ef0 = UN, și are expresia:
M_max=(3U_N^2)/(ωX_s )
Expresia exactă a cuplului electromagnetic (când nu se neglijează rezistența R) este:
M=3/ω (UE_f0 (R cos〖θ_0 〗-X_s sin〖θ_0 〗 )-RE_f0^2)/(R^2+X_s^2 )
Notând b = R/Xs, rezultă expresia cuplului relativ (specific):
m=(b∙cos|θ_0 |+sin|θ_0 |-b)/(1+b^2 )
Valoarea maximă a cuplului m se obține pentru b = ctg|θ0| și are expresia:
m_max=(1-b/√(1+b^2 ))/√(1+b^2 )
Pentru b = 0, rezultă:
m=sin|θ_0 |
iar pentru θ0 = 0, se obține m = 0, indiferent de valorile lui b.
În figura următoare (figura 2.) , sunt reprezentate caracteristicile unghiulare m = f(θ0) pentru regimul de funcționare ca motor, pentru diferite valori ale lui b.
Figura 2. Caracteristicile unghiulare ale motorului sincron cu magneți permanenți
2. Particularitățile pornirii unui motor sincron cu magneți permanenți
În cazul motoarelor sincrone cu magneți permanenți, pornirea cu o poziție necunoscută a rotorului poate fi însoțită de o rotație inversă temporară sau poate provoca o eroare de pornire. Aceste eventualități nu sunt tolerate în multe aplicații. Astfel, în cazul în care poziția inițială a rotorului nu este cunoscută, pentru pornirea în condiții de siguranță trebuie să fie pusă în aplicare o procedură corectă de pornire. În conformitate cu diferitele propuneri din literatura de specialitate, procedurile posibile de pornire pot fi grupate, cu referire la principiul de bază, după cum urmează:
pornind de la poziția predeterminată a rotorului, stabilită prin alimentarea corectă;
pornirea cu circuit deschis (open-loop);
estimarea poziției rotorului la oprire prin intermediul unor algoritmi specifici.
Prima metodă se referă la posibilitatea de aliniere a axei magnetului în direcția unui curent statoric fix. Acest lucru poate fi realizat print controlul curentului într-un circuit închis, sau printr-o schemă cu circuit deschis, pur și simplu prin impunerea unui anumit model de circuit inversor să se alinieze cu una dintre axele de fază. Fiabilitatea acestei metode este afectată de prezența unui cuplu de sarcină, a cărui valoare poate provoca o defazare între poziția de aliniere impusă și cea reală.
Pornirea într-un circuit deschis este concepută ca, accelerația motorului urmărește un câmp statoric învârtitor a cărui poziție unghiulară este generată într-o schemă cu circuit deschis. Această metodă este, de obicei, adoptată în circuite fără senzori cu tensiuni contra electromotoare iar funcționarea circuitului deschis este menținută până la o viteză dată la care estimarea poziției rotorului este suficient de precisă. Punctul critic al acestei metode este alegerea legii de variație în timp a poziției circuitului deschis. Acesta trebuie să fie atent selectată, în scopul asigurării unei porniri în condiții de siguranță, cu oscilații minime de până la cuplul maxim.
Printre algoritmii specifici pentru estimarea poziției rotorului la staționare, o abordare interesantă este utilizarea unui sistem de control după orientarea câmpului cu encoder incremental. Poziția rotorului este detectată prin luarea în considerare a efectului asupra poziției măsurate a unui semnal de încercare pseudoaleator cu secvență binară adăugat curentului de referință. În ceea ce privește pe deplin aplicațiile fără senzori, alte metode trebuiesc aplicate. O gamă largă de sisteme fără senzori folosind tehnici de estimare a poziției rotorului sunt de asemenea disponibile, dar cele mai multe dintre ele nu detecteze poziția rotorului la oprire.
Bibliografie
a) Viorel I.A, Biró K.A., "Permanent-magnet synchronous motor simplified fieldcircuit model", Proc. of Electromotion '95, Cluj.
b) Jacek F. Gieras, Mitchell Wing, Marcel Dekker Inc., "Permanent Magnet Motor Technology", New York 2002.
c) Mihai Cheles, "Sensorless Field Oriented Control for a Permanent Magnet Synchronous Motor Using a PLL Estimator and Field Weakening (FW) ", Microchip Technology Inc., 2009.
d) http://ww1.microchip.com/downloads/en/AppNotes/Sensorless-FOC-For-PMSM-using-PLL-Estimator-FW-AN-DS00002520C.pdf
e) https://biblioteca.regielive.ro/licente/electrotehnica/motorul-sincron-cu-magneti-permanenti-mecanica-273726.html
f) https://www.slideshare.net/dharmeshlnakum12/synchronous-motor-drive-75047444?qid=2cc4809b-10e1-4e5e-a773-af2e14d51e47&v=&b=&from_search=10
g) https://www.semanticscholar.org/paper/Adaptive-position-tracking-control-of-permanent-on-Qi-Shi/b3c1cac938d159a888d13f9b419f7b3a960d2a1d?fbclid=IwAR0cOQJzluR5fTRuyJlrx23WzxzxQiFPDCJOe_GXAKm46Bhuv11cvuulixs
h) https://nl.mathworks.com/help/physmod/sps/ref/pmsmfieldorientedcontrol.html
i) https://en.engineering-solutions.ru/motorcontrol/pmsm/
j) http://users.utcluj.ro/~birok/MS/4-Masini_cu_MP.pdf
k) https://www.researchgate.net/figure/Closed-Loop-PLL-speed-and-position-estimator-structure_fig4_224393446
Preview document










Conținut arhivă zip
- Sisteme de actionare pentru reglarea automata a pozitiei utilizand motoare sincrone.docx
Alții au mai descărcat și

Elemente Arcuitoare Generalitati: Folosirea elementelor arcuitoare în constructia produselor electrotehnice este legata de principiul de...

Proiect A.S.D.N. Tema: Realizarea unui automat de sortat mere dupa diametru (diametre între 5,5 si 6 cm si între 7,5 si 8 cm) precum si dupa...


ARGUMENT Iluminat normal se refera la instalatiile utilizate zilnic,in conditii normale. Iluminatul de siguranta trebuie sa asigure evacuarea...

1. Domeniu de aplicare Norma se refera la verificarea/etalonarea voltmetrelor indicatoare si inregistratoare,destinate masurarilor de tensiuni...
Te-ar putea interesa și

1. ELEMENTE GENERALE 1.1 Definiţii. Elemente constructive Maşina electrică este un sistem de circuite electrice plasate pe miezuri magnetice în...