Extras din referat
1. Aplicaţii ale sistemelor de robocare
1.1 Sisteme de robocare pe roţi
Sistemele de fabricaţie flexibile utilizate în producţia de serie mică şi mijlocie, sunt definite ca fiind o interacţiune dintre fluxurile de materiale, de energie şi de informaţie cu scopul de a satisface sarcinile de producţie.
Pentru automatizarea fluxului de materiale se impune:
- Utilizarea unui sistem de robocare pentru automatizarea operaţiilor de transfer lung din cadrul fluxului tehnologic de fabricaţie sau de montaj;
- utilizarea de roboţi industriali pentru automatizarea operaţiilor de manipulare (transfer scurt) a pieselor din cadru celulelor de fabricaţie flexibilă sau a celulelor de montaj automat;
- integrarea informaţională a tuturor componentelor sistemului de fabricaţie flexibilă (maşini unelte, centre de prelucrare, echipamente de montaj, instalaţii de alimentare /evacuare, roboţi industriali, sistem de robocare, depozit central automat şi depozite intermediare automate etc.); Prin integrarea informaţională a tuturor echipamentelor şi a activităţilor ce le implică transferul automat de materiale, se realizează premizele optimizării fluxului de materiale în cadrul unui proces de producţie.
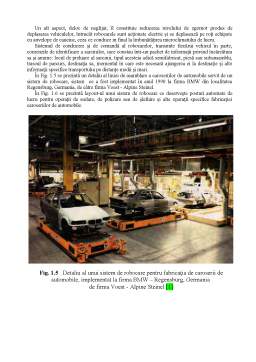
În domeniul industrial sistemele de robocare sunt utilizate pentru automatizarea fluxului de materiale, dintre:
a. depozitul central automat şi celule de fabricaţie flexibilă;
b. depozitul central automat şi liniile tehnologice de montaj.
Un sistem de robocare este o tehnologie de vârf în domeniul transferului automat de materiale, care se compune dintr-un număr de vehicule ghidate automat după o traiectorie materializată printr-o cale de ghidare şi controlate în mişcarea lor de un calculator. Robocarul este capabil să-şi selecteze traiectoria spre staţia de lucru servită fără intervenţia operatorului uman. Un sistem de control central comandă şi conduce sistemul de robocare.
Problema esenţială este optimizarea traficului de robocare pentru o anumită traiectorie aleasă. Pentru a atinge acest ţel managementul întregului sistem este asigurat de un sistem de planificare asistată de calculator, CAPS - Computer Aided Planning System. Acesta asigură comanda de la distanţă a tuturor robocarelor în toate staţiile de lucru pentru încărcarea /descărcarea materialelor sau pieselor, separate sau fixate pe palete, deplasarea robocarelor pe traiectoria prestabilită, durata staţionărilor, deplasarea la staţia de încărcare a bateriilor etc. Dependent de programul de producţie principal, MPS - Master Production Schedule şi în acord cu desenul de execuţie, elaborat prin proiectarea asistată de calculator, CAD - Computer Aided Design, şi cu tehnologia de execuţie, elaborată prin proiectarea procesului tehnologic asistat de calculator, CAPP - Computer Aided Process Planning, în baza programului – bonul de materiale, BOM - Bill of Materials elaborat de CAPS se emite o comandă de preluare a materialelor sau pieselor dintr-un depozit automat, AS/RS - Automated Storage and Retrieval System.
În conformitate cu tabelul de componenţă al ansamblului general şi cu lotul lansat în fabricaţie, se stabileşte, în acord şi cu MPS, fluxul de aprovizionare cu materiale a depozitului automat, ţinând seama şi de principiul "just in time". Optimizarea fluxul de materiale este asigurată de programul de planificare a necesarului de materiale, MRP - Material Requirement Planning, care programează perioada de achiziţie a diferitelor cantităţi de materiale, perioada de introducere a acestora în depozite, respectiv de scoatere şi de transfer a lor cu ajutorul sistemului de vehicule ghidat automat.
Aceste materiale sau piese sunt încărcate în mod automat de un robot industrial pe un robocar, după care sunt transferate de acesta în staţiile de lucru ale sistemului de fabricaţie flexibil, FMS - Flexible Manufacturing System, sau sistemului de asamblare flexibilă, FAS - Flexible Assembly System.
1.1.1. Automatizarea fluxului de materiale pe liniile tehnologice de fabricaţie
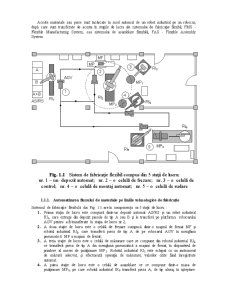
Sistemul de fabricaţie flexibilă din Fig. 1.1 are în componenţa sa 5 staţii de lucru :
1. Prima staţia de lucru este compusă dintr-un depozit automat AS/RS şi un robot industrial RI1, care extrage din depozit piesele de tip A sau B şi le transferă pe platforma robocarului AGV pentru a fi transferate în staţia de lucru nr.2;
2. A doua staţie de lucru este o celulă de frezare compusă dintr-o maşină de frezat MF şi robotul industrial RI2, care transferă piesa de tip A de pe robocarul AGV în menghina pneumatică MP a maşinii de frezat;
3. A treia staţie de lucru este o celulă de măsurare care se compune din robotul industrial RI2, ce transferă piesa de tip A din menghina pneumatică a maşinii de frezat, în dispozitivul de prindere al mesei de poziţionare MP1. Robotul industrial RI3 este echipat cu un instrument de măsură adecvat, şi efectuează operaţia de măsurare, valorilor citite fiind înregistrate automat.
4. A patra staţie de lucru este o celulă de asamblare ce se compune dintr-o masa de poziţionare MP2, pe care robotul industrial IR2 transferă piesa A, de tip alezaj, în aşteptare. În momentul sosirii in staţia de lucru a robocarului purtând piesa B de tip arbore, robotul industrial RI4 preia piesa de tip A de pe masa de poziţionare şi o asamblează cu piesa de tip B de pe paleta transportată de robocar.
5. A cincia staţie de lucru este o celulă de sudare compusă din robotul industrial RI5, utilizat pentru manipulare pieselor A şi B asamblate, de pe robocar pe masa de poziţionare MP3 şi robotul industrial de sudare RI6 ce manipulează pistolul de sudare pentru îmbinarea celor două piese. După sudarea celor două piese acestea sunt transferate de robotul industrial RI5, pe platforma robocarului, care le transportă la depozitul automat AS/RS.
În Fig. 1.2 se prezintă în detaliu o vedere asupra staţiei de lucru nr. 2, din care se observă principalele componente, şi anume: o maşină de frezat MF, tip FSRS 400 - XNC, un robot industrial românesc RI2 cu acţionare electrică tip REMT–2, care transferă piesa de pe robocarul AGV, conceput şi executat la Universitatea "Politehnica" din Timişoara, în dispozitivul de lucru al maşinii de frezat, care este de fapt o menghină cu bacuri paralele acţionată pneumatic.
Automatizarea fluxului de materiale pe liniile tehnologice de montaj
Preview document












Conținut arhivă zip
- Roboti Industriali.doc
Alții au mai descărcat și

Baze de date multimedia Definirea conceptelor. Aplicatii. Data base - baza de date - este un grup de fisiere în care este înregistrata o multime...

Aplicatii client server Studiu de caz- Solutie de gestiune a Resurselor Umane si Salarizarii Solutiile de gestiune economica Mobius, sunt...

RETELE WIRELESS Introducere Cresterea popularitatii retelelor wireless a determinat o scadere rapida a pretului echipamentelor wireless...

“Feedback-ul este ceea ce lipsea din stiinta, in afara lui Newton”, spunea omul de stiinta britanic Steve Grand. “Noi credeam ca este un fenomen...

Programul realizeaza determinarea procesului de incalzire ,respectiv racire intr-o camera si a timpului (maxim respectiv minim) in functie de trei...

I. INTRODUCERE Dezvoltarea ştiinţei a demonstrat că cele mai spectaculoase progrese se obţin prin cercetare pluridisciplinară, situată la graniţa...

Scheme Hidraulice Prima schema Hidraulica este in figura 1: Figura 1 A doua schema hidraulica este in figura 2 : Figura 2 A treia schema...
Te-ar putea interesa și

CAPITOLUL 1 Prezentarea generală a roboţilor industriali 1.1 Descrierea roboţilor industriali Actualmente, mediile industriale trebuie să...

Capitolul I 1.1. Roboții industriali Robotul industrial este reprezentat printr-o mașină automată ce poate fi programată, pentru deplasarea...

CAPITOLUL 1 INTRODUCERE 1.1. GENERALITATI Robotica reprezintă un domeniu de ştiinţă multidisciplinar, care cuprinde elemente de Fizică,...

INTRODUCERE Lucrarea de licentă analizează cinematica mecanismelor din compunerea roboţilor, bazele teoretice ale dinamicii roboţilor industriali...

1. ROBOTI INDUSTRIALI - INTRODUCERE Robotica este un domeniu al ştiinţei şi tehnicii relativ nou, cu o rapidă dezvoltare, legat de realizarea şi...

Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte insemnata din efortul...

Rezumat Ȋn lucrarea de faţă este prezentat un robot industrial cu mişcări de rotaţie şi translaţie comandat de un controler logic programabil....

. Definitia robotului si a robotului industrial Robotul este un sistem cu functionarea automata, adaptabila prin programare conditiilor mediului...