Cuprins
- 1. Introducere 2
- 2. EXEMPLU DE APLICARE .2
- 3. CONSTRUIREA SISTEMULUI DE ASAMBLARE .3
- 3.1. Robotul de asamblare 3
- 3.2. Senzor optic 3D 4
- 4.. PROPRIETĂŢILE SISTEMULUI 5
- 4.1. Recunoaşterea obiectului 5
- 4.2. Controlul robotului şi comunicarea cu senzorul optic 3D 5
- 4.3. Calibrarea sistemului de asamblare 6
- 5.REZULTATE 9
- 6. CONCLUZII 9
Extras din referat
Abstract
Pentru asamblarea microsisteme hibride ,o precizie ridicată de ordinul catorva micrometri este necesară.Combinaţia unui robot paralel cu un senzor integrat cu vedere 3D utilizează marcaje de poziţionare pe obiecte pentru recunoaşterea obiectului. În cadrul procesului de asamblare, preciziile de poziţionare relativă în gama micronilor fost obţinute. Prin urmare, este necesar să se utilizeze o strategie de calibrare pentru potrivirea sistemului de coordonate a senzorului cu vedere 3D cu sistemul de coordonate al robotului. Construcţia sistemului, calibrarea aplicata şi precizie de poziţionare realizate de catre robot vor fi discutate.
Cuvinte cheie:
Asamblare, recunoaşterea obiectului, control
1. INTRODUCERE
In zilele noastre, o miniaturizare continuă a produselor şi a componentelor poate fi observata în aproape toate zonele de aplicare din lume. În acest context, se face o distincţie între microsistemele hibride si cele monolit - acestea din urmă necesită un fel de proces de asamblare. Van Brussel si colab. [1] descriu diferite aspecte ale asamblarii microsistemelor şi constituie utilitatea microasamblarii automate, care necesită o precizie în micrometri şi o gamă micrmetrica.
Diferite strategii de asamblare, cum ar fi în teleprezenta microasamblarii [2], microrobotica[3], fabrici-desktop [4, 5] şi sisteme de asamblare adaptate dupa marime [6] sunt în activităţilor de cercetare actuale. În această lucrare un concept de sistem de asamblare adaptat dupa marime va fi discutat. It Acesta constă dintr-un robot paralel cu mare precizie şi cu un sensor cu vedere 3D miniaturizat cu o singura camera video. Acest sistem de asamblare permite atingerea unei înalte precizii de poziţionare relativă de sub un micrometru în timpul asamblării microsistemelor hibride.
2. EXEMPLU DE APLICARE
O sarcină importantă a sistemului de asamblare este de a valida principiile pe ansamblul de microsisteme hibride. Motoarele liniare pas cu pas, care funcţionează pe principiul rezistentei, actioneaza ca demonstratori. Piesele demonstratorului sunt în principal fabricate cu tehnologii micro dezvoltate în cadrul Centrului de colaborare în cercetare 516. O asamblare ghidata de un senzor este reprezentata de unirea ghidurilor pe suprafaţa elementului stator al motorului. Dimensiunile obiectului ajung la gama centimetrilor, dar trebuie să fie asamblate cu o precizie de asamblare de aproximativ un micrometru într-un proces de poziţionare relativă. Prin urmare, recunoaşterea obiectului (a se vedea 4.1 şi Figura 4), precum şi comunicarea dintre robot şi senzorul optic 3D (A se vedea 4.2) sunt utilizate într-o procedura "look-and-move"("Uite-şi muta"). "Uite-şi muta" înseamnă, că recunoaşterea obiectului ia loc atunci când mişcarea robotului este terminat şi un nou pasul de corecţie trebuie să fie executat.
3. CONSTRUIREA SISTEMULUI DE ASAMBLARE
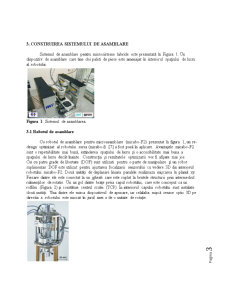
Sistemul de asamblare pentru microsisteme hibride este prezentată în Figura 1. Un dispozitiv de asamblare care tine doi paleti de piese este amenajat în interiorul spaţiului de lucru al robotului.
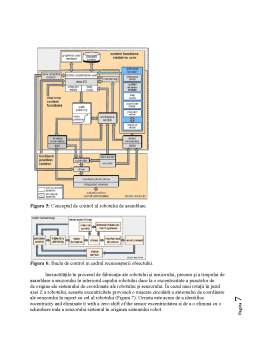
Figura 1: Sistemul de asamblarea.
Preview document







Conținut arhivă zip
- Asamblarea Microsistemelor Hibride Utilizand un Sistem de Asamblare cu Senzor Optic 3D.doc
Alții au mai descărcat și

INTRODUCERE Disciplina de Senzori şi Traductoare oferă studenţilor, de la profilurile electrice, cunoştinţele necesare înţelegerii principiilor de...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...