
Extras din referat
Generalităti :
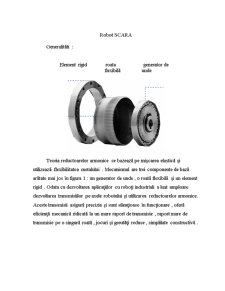
Element rigid roata generator de
flexibilă unde
Teoria reductoarelor armonice se bazează pe mişcarea elastică şi utilizează flexibilitatea metalului . Mecanismul are trei componente de bază arătate mai jos în figura 1 : un generator de unde , o roată flexibilă şi un element rigid . Odata cu dezvoltarea aplicaţiilor cu roboţi industriali a luat amploare dezvoltarea transmisiilor pe axele robotului şi utilizarea reductoarelor armonice. Aceste transmisii asigură precizia şi sunt silenţioase în funcţionare , oferă eficienţă mecanică ridicată la un mare raport de transmisie , raport mare de transmisie pe o singură roată , jocuri şi greutăţi reduse , simplitate constructivă .
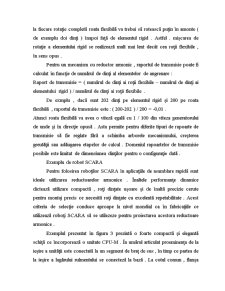
Fig. 2
Funcţionare :
Versiunile mai complexe utilizează de obicei un al 4 – lea element pentru a reduce lungimea mecanismului sau pentru a mări raportul de transmisie în interiorul unui diametru mai mic , dar tot urmăreşte acelaşi principiu de funcţionare . Generatorul de unde se compune din două părţi separate : un disc eliptic numit “ ştiftul generatorului de unde “ şi un rulment cu bile la ieşire . Ansamblul este introdus într-un lagăr dându-i acestuia o formă eliptică . Roata flexibilă e ca un pahar deformabil . Partea paharului unde angrenează este foarte subţire , dar partea de jos a acestuia este groasă şi rigidă . Rezultă o flexibilitate importantă a pereţilor peretelui în partea subţiată , dar partea de jos închisă este rigidă şi capabilă a fi strânsă sigur ( pe un arbore , de exemplu ) . Roata flexibilă prezintă la exterior partea danturată . Roata flexibilă este bine fixată generatorului de unde , astfel că atunci când acesta e rotit , roata flexibilă se deformează sub forma unei eclipse , dar nu se roteşte în acelaşi fel cu generatorul de unde . Elementul rigid este un inel rigid ce prezintă la interior partea danturată ce angrenează . Roata flexibilă şi generatorul de unde sunt plasaţi în interiorul elementului rigid , partea danturată a roţii flexibile angrenând cu partea danturată a elemetului rigid . Deoarece în urma deformaţiei roata flexibilă are o formă eliptică , angrenarea nu se realizează decât între dinţii situaţi la extremităţile axei celei mai mari a eclipsei . Presupunem că actual generatorul de unde are mişcare de rotaţie la intrare . În timp ce generatorul de unde se roteşte , dinţii ce vin în agrenare se schimbă datorită mişcării acestuia . În mişcare de rotaţie , punctele unde se realizează angrenarea pe cea mai mare axă a roţii flexibile se rotesc în jurul originii în acelaşi ritm cu generatorul de unde . Elementul cheie la proiectarea reductorului armonic este că sunt dinţi de eucalipt ( de exemplu doi ) pe roata flexibilă . Asta înseamnă ca la fiecare rotaţie completă roata flexibilă va trebui să rotească puţin în amonte ( de exemplu doi dinţi ) înapoi faţă de elementul rigid . Astfel . mişcarea de rotaţie a elementului rigid se realizează mult mai lent decât cea roţii flexibile , în sens opus .
Pentru un mecanism cu reductor armonic , raportul de transmisie poate fi calculat în funcţie de numărul de dinţi al elementelor de angrenare :
Raport de transmisie = ( numărul de dinţi ai roţii flexibile – numărul de dinţi ai elementului rigid ) / numărul de dinţi ai roţii flexibile .
Preview document








Conținut arhivă zip
- Mecanisme Robotizate.doc
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...

I. GENERALITĂŢI 1.1. INTRODUCERE Progresul rapid al tehnicii, este condiţionat de dezvoltarea şi aplicarea unor procedee tehnologice moderne...

1. INTRODUCERE Denumirea companiei: THYSSENKRUPP BILSTEIN COMPA S.A. ThyssenKrupp ThyssenKrupp AG este un important furnizor în industria...

1.Construcţia maşinilor-unelte agregate Maşinile-unelte agregate pot fi definite ca maşini-unelte formate din unul sau mai multe posturi de lucru...

Rezumat Conceperea și proiectarea unui dispozitiv pentru debavurat a aparut ca o necesitate de ordin practic în mediile industriale si de...

Capitolul I Stadiul actual al tehnologiilor de sudare 1.1. Introducere. Scurt istoric. Un proces vechi de când lumea. Textul biblic pomeneşte...

INTRODUCERE Lucrarea de licentă analizează cinematica mecanismelor din compunerea roboţilor, bazele teoretice ale dinamicii roboţilor industriali...

Cap. 1 Introducere 1.1 Prototiparea virtuală Prototipare virtuală este o ramură a ingineriei care cu ajutorul unui software ne ajuta în simularea...