Cuprins
- 1. Introducere.pag.3
- 2. Prezentare.pag.4
- 2.1 Ce este un Robot.pag.4
- 2.1.1 Scurt istoric.pag.4
- 2.1.2 Clasificarea roboţilor.pag.4
- 2.1.3 Roboţii industriali. .pag.5
- 2.1.4.Mod de interacţiune.pag.6
- 2.1.5 Concluzii şi dezvoltare ulterioară.pag.7
- 2.1.6 Axa robotizata.pag.8
- 3. Manipulator SCARA.pag.10
- 3.1. Scurtistoric.pag.10
- 3.2. Mecanismul manipulator SCARA.pag.11
- 3.2.1 DINAMICA.pag.12
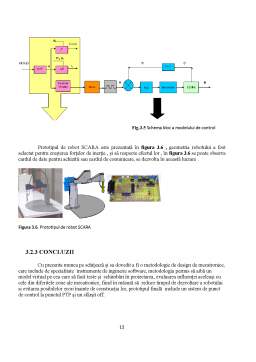
- 3.2.2 CONTROL sistem de proiectare.pag.12
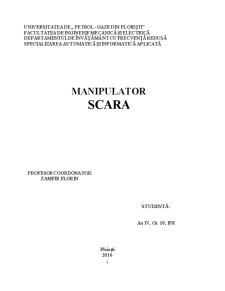
- 3.2.3 CONCLUZII.pag.13
- Bibliografie.pag.14
Extras din referat
ROBOTI INDUSTRIALI
1. Introducere
Este deosebit de dificilă formularea unei definiţii care să cuprindă toate caracteristicile unui robot în câteva rânduri. Din acest motiv, există mai multe definiţii ale aceluiaşi termen, date de unele dintre companiile constructoare sau asociaţiile naţionale din domeniu. Fiecare dintre acestea încearcă să definească în moduri diferite, acelaşi produs al inteligenţei umane.
- RIA (Robot Institute of America): „Robotul este un manipulator multifuncţional, reprogramabil, destinat deplasării materialelor, pieselor, sculelor sau altor dispozitive specializate prin mişcări variabile, programate pentru a îndeplini anumite sarcini”.
- JIRA (Japan Industrial Robot Association): „Robotul este un dispozitiv versatil şi flexibil care oferă funcţii de deplasare similare celor ale membrelor umane sau ale cărui funcţii de deplasare sunt comandate de senzori şi de mijloace proprii de recunoaştere”.
- BRA (British Robot Association): „Robotul este un dispozitiv reprogramabil realizat pentru manipularea şi transportul pieselor, sculelor sau altor mijloace de producţie prin mişcări variabile programate pentru a îndeplini sarcini specifice de fabricaţie”.
- General Motors: „Robotul este un echipament fizic cu funcţionare programabilă capabil să efectueze anumite operaţii şi secvenţe de operaţii orientate spre manipularea de piese, scule, subansamble”.
Din definiţiile prezentate mai sus se poate observa că, în cele mai multe cazuri, accentul se pune pe latura industrială a robotului. Una dintre primele definiţii date acestei creaţii mecanice arată că acesta imită omul sau posibilităţile sale de acţiune.
Dacă acum câtiva ani, robotii mobili erau folositi doar în scopuri educationale sau pentru cercetare, acum aceştia încep să devină folositi pe scară largă şi în alte tipuri de sisteme.
1938 – prima incercare de realizare a unui robot in conceptie antropomorfa, din partea inginerului american Wenslei (Westinghouse Electric Manufacturing Co.)
1940 – se mentioneaza utilizarea primelor manipulatoare sincrone pentru manevrarea substantelor radioactive
1959 – Joseph Engelberger construieste la firma Unimotion Inc. primul robot: UNIMATE
2.Prezentare
2.1.Ce este un robot?
2.1.1. Scurt istoric
Cuvântul robot provine din limba cehă (robota) şi înseamnă muncitor, sau rob. ProvenienĠa acestui cuvânt este strâns legată de scenaristul Karel Capek, care a introdus acest cuvânt în anul 1921 într-una din scenetele acestuia: R.U.R. (Rossum’s Universal Robots). Tema acestei scenete era despre dezumanizarea persoanei într-o civilizaĠie bazată din ce în ce mai mult pe tehnologie. Pentru prima data cuvântul „robot” a fost introdus în anul 1921 de dramaturgul ceh Karel Capek în piesa de teatru „Roboţii universali ai lui Rossum” („Rossum 's Universal Robot”),. Cuvântul este un derivat din „robota” termen care, în limbile slavone, desemnează munca (de obicei munca grea).
Un robot este un operator mecanic sau virtual, artificial. Robotul este un sistem compus din mai multe elemente: mecanică, senzori și actuatori precum și un mecanism de direcționare. Mecanica stabilește înfățișarea robotului și mișcările posibile pe timp de funcționare. Senzorii și actorii sunt întrebuințați la interacția cu mediul sistemului. Mecanismul de direcționare are grijă ca robotul să-și îndeplinească obiectivul cu succes, evaluând de exemplu informațiile senzorilor. Acest mecanism reglează motoarele și planifică mișcările care trebuiesc efectuate.
În momentul de faţă, roboţii industriali reprezintă punctul de intersecţie al ultimelor descoperiri dintr-o serie de domenii: mecanica, automatica, electronica, calculatoare şi sisteme de acţionare. Complexitatea acestei ramuri se reflectă atât asupra arhitecturii mecanice cât şi asupra sistemului de conducere. Robotul este rezultatul acestor descoperiri tehnico - ştiinţifice, în urma necesităţii realizării funcţiilor (acţiunilor) umane într-un mediu industrial normal. Astfel, robotul poate fi definit ca un sistem tehnologic complex care poate să înlocuiască sau să asiste munca omului la o linie de producţie sau în manipularea unor utilaje. Obiectivele principale avute în vedere prin introducerea manipulatoarelor şi roboţilor sunt: creşterea productivităţii muncii; eliminarea disconfortului fizic şi psihic al unor activităţi de producţie.
2.1.2 Clasificarea roboţilor
1. Din punctul de vedere al gradului de mobilitate se cunosc roboţi ficşi şi roboţi mobili.
2. După domeniul de aplicare: a) sector primar (agricultură, minerit); b) sector secundar, producţie materială (procese continue şi procese discontinue); c) sector terţiar (medicină, domeniul nuclear); d) sectoare speciale (explorări spaţiale, subacvatice, etc.).
3. Din punct de vedere al sistemului de coordonate roboţii funcţionează în sistem de coordonate carteziene (18%), cilindrice (33%), sferice (40%) şi structura robotului antropomorf.
4. Din punct de vedere al sistemului de comandă: comanda punct cu punct (unde nu
interesează traiectoria propriu-zisă); comanda multipunct (implică coordonarea mişcării
axelor); comanda pe traiectorie continuă (implică toţi parametrii de mişcare).
5. Din punct de vedere al sarcinii manipulate.
6. Din punct de vedere al sistemului de acţionare: hidraulică (40%), electrică (30%), pneumatică (21%), mixtă.
7. Din punct de vedere al preciziei de poziţionare.
8. Din punctul de vedere al sistemului de comandă (generaţie):
a) roboţi din generaţia I- a - aceşti roboţi sunt practic manipulatoare şi roboţi programabili (neadaptivi);
b) roboţi din generaţia a II-a - roboţi adaptivi;
c) roboţi din generaţia a-III-a roboţi inteligenţi.
Pe baza celor de mai sus, se observă că principalul criteriu de clasificare se referă la sistemul de comandă (sistemul de conducere).
Bibliografie
1. Brian P. Gerkey, Richard T. Vaughan, Kasper Støy, Andrew Howard, Maja J Matari´c and Gaurav S Sukhatme. Most Valuable Player: A Robot Device Server for Distributed Control. In Proc. of the IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pages 1226–1231, Wailea, Hawaii, October 2001.
2. Brian P. Gerkey, Richard T. Vaughan, and Andrew Howard. The Player/Stage Project: Tools for Multi-Robot and Distributed Sensor Systems. In Proc. of the Intl. Conf. on Advanced Robotics (ICAR), pages 317–323, Coimbra, Portugal, July 2003.
3. Lucian Buşoniu, Sisteme multiagent în DBIST şi testare distribuită, (2003), Facultatea de Automatică şi Calculatoare, Universitatea Tehnică din Cluj-Napoca
4. Richard T. Vaughan, Brian P. Gerkey, and Andrew Howard. On device abstractions for portable, reusable robot code. In Proc. of the IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pages 2121–2427, Las Vegas, Nevada, October 2003.
5.Kurfes, T. robotică și automatizare Manual.
http://en.wikipedia.org/
http://www.welding-robots.com/
http://www.abcm.org.br/anais/cobem/2007/pdf/COBEM2007-0200.pdf
Preview document












Conținut arhivă zip
- Roboti Industriali - Manipulatori scara.doc
Alții au mai descărcat și

CAPITOLUL 1 Prezentarea generală a roboţilor industriali 1.1 Descrierea roboţilor industriali Actualmente, mediile industriale trebuie să...

1.Introducere Notiunea de robot dateaza de peste 4 mii de ani. Omul si-a imaginat dispozitive mecanizate inteligente care sa preia o parte...

Roboti Industriali 1. Introducere Dezvoltarea exponenţială a sistemelor informatice cât şi a microelectronicii în ultima perioadă, precum şi...

1.Introducere in problematica robotilor Cuvântul robot provine din limba ceha (robota) şi înseamna muncitor, sau rob. Provenienta acestui cuvânt...

Un robot este un dispozitiv mecanic, capabil să imite anumite funcţii umane, precum cele de manipulare a obiectelor sau de locomoţie în scopul...

1. Introducere Cuvântul ,, robot ,, a fost folosit pentru prima dată în sensul acceptat astăzi, în anul 1920 de către scriitorul ceh K. Capek ,...

Sa se proiecteze procesul tehnologic si stanta sau matrita pentru obtinerea piesei din figura 1. Materialul utilizat este TDA3 ( tabla decapata...
Te-ar putea interesa și

Memoriu de prezentare Activitatea umană s-a orientat întotdeauna spre realizarea unei vieţi mai bune, spre eliberarea parţială sau totală de...
CAPITOLUL 1 Prezentarea generală a roboţilor industriali 1.1 Descrierea roboţilor industriali Actualmente, mediile industriale trebuie să...

Capitolul I 1.1. Roboții industriali Robotul industrial este reprezentat printr-o mașină automată ce poate fi programată, pentru deplasarea...

1.1 Conceptul de „Robotică” Robotica este acea parte a ştiinţei care se ocupă cu studiul operaţiilorumanoide şi se situează la frontiera mecanicii...

INTRODUCERE Lucrarea de licentă analizează cinematica mecanismelor din compunerea roboţilor, bazele teoretice ale dinamicii roboţilor industriali...

TEMA DE PROIECT Să se proiecteze un robot industrial cu arhitectură generală de tip SCARA, cu următoarele caracteristici tehnice generale:...
Roboti Industriali 1. Introducere Dezvoltarea exponenţială a sistemelor informatice cât şi a microelectronicii în ultima perioadă, precum şi...

Descrierea întreprinderii S.C Nissa 95 Serco SRL este o societate comercială ce are ca principal obiect de activitate fabricarea echipamentelor de...